
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

... - FCG-400 系列真空抓取系统(带吸盘型)是一种模块化的多功能解决方案,可处理各种不同尺寸、形状和孔隙率的产品 - 主要用于码垛纸板箱、夹层和托盘 - Power&light 版采用轻质碳纤维机身和高吸力流量 - 内置高能效多级 EJ-LARGE-HF-3 滤芯 - 用于连接外部真空源(鼓风机、电动泵)的中央真空端口 - 自闭阀允许使用较小的真空泵,即使抓取器的大部分表面未被覆盖,也能确保较高的真空度 - 附加真空感应端口,用于在抓取过程中监控真空度 ...
GIMATIC/意大利GIMATIC

... - FGS-060 系列真空抓取系统(带泡沫型)是一种模块化的多功能解决方案,可处理各种不同尺寸、形状和孔隙率的产品 - 集成 EJ-LARGE-HF-3 多级滤筒,确保高抽吸流量和低功耗 - 带校准孔的型号非常适合处理具有特定形状和重量且表面密封的物体(玻璃、金属板)。 - 带自闭阀的型号适用于需要处理不同尺寸/形状物体的应用场合。它允许用户使用较小的真空泵,减少了消耗,并能保持较高的真空度,即使夹具的大部分表面区域可能没有被抓取。 ...
GIMATIC/意大利GIMATIC

... 规格 120 的真空抓取系统,泡沫厚度为 20 毫米,配有真空电磁阀和吹气装置 ...
GIMATIC/意大利GIMATIC

夹紧力: 15 N - 225 N
运行行程: 20 mm - 160 mm
双作用 工作压力2 ÷ 8 bar(规格 10 的为 3 ÷ 8 bar) 工作温度5 ÷ 60°C 润滑润滑或不润滑 重复精度± 0.1 mm 理论夹持力(N)* * 理论夹持力以工作压力为 0.5 MPa,夹持点力臂 R = 40 mm(Ø 10, 16, 20, 25)或 R = 80 mm(Ø 32)计算所得。10 16 20 25 32 接口M5 M5 M5 M5 G1/8 介质15 45 75 125 225
CAMOZZI AUTOMATION/康茂胜

夹紧力: 141, 19, 48, 90 N
运行行程: 8 mm - 80 mm
... 长行程 CGPL 系列平行机械手是一种灵活高效的解决方案,适用于空间受限的应用场合。集成的滚珠轴承导轨和紧凑轻便的设计,即使在高负载循环情况下,也能快速精确地搬运部件。这种平行机械手采用扁平结构,可承受高负载和快速加速,是装配和工业机器人的理想解决方案。 结构类型 - 自定心平行机械手 孔径 - 8、12、16、20 气接头 - M3 (8) M5 (12, 16, 20) 工作压力 - 1,5 ÷ 7 bar (8) 1 ÷ 7 bar (12, 16, 20) 工作温度 ...
CAMOZZI AUTOMATION/康茂胜

结构形式 - T 型导轨定心式平行爪钳 与介质接触的材料 - 单作用(常开或常闭),双作用 工作压力 - 2 ÷ 8 bar (双作用), 4 ÷ 8 bar (单作用) 工作温度 - 5°C ÷ 60°C (标准型) - 5°C ÷ 150°C (高温型) 介质 - 洁净空气,无需使用(过滤精度等级符合 ISO 8573-1 7.4.4) 如果使用了油雾润滑,应不间断的使用油雾润滑(建议使用 ISO VG32 润滑油) 润滑 - 经过一千万次循环动作后,请使用 ...
CAMOZZI AUTOMATION/康茂胜

... 6300 系列气动机械手通常用于装配机、机器人、机械手等复杂系统中。 该系列可满足该领域的各种要求,实现多种应用。 ...
PNEUMAX/纽迈司

... 6300 系列气动机械手通常用于装配机、机器人、机械手等复杂系统中。 该系列可满足该领域的各种要求,实现多种应用。 ...
PNEUMAX/纽迈司

... 6300系列的气动抓取器通常用于复杂的系统,如装配机、机器人、机械手等。 该系列涵盖了该领域的广泛要求,允许各种应用。 气动抓取器,角型 180°角形 ...
PNEUMAX/纽迈司

描述 基爪在滚子轴承导轨上平稳运行的二指平动机械手 应用领域 在低污染环境中抓取和移动中小型工件,例如装配、测试、实验室和制药行业 优点 - 为您带来的益处 交叉滚子导轨 用于通过无间隙基爪导轨实现精确抓取 椭圆形活塞传动原理 用于最大抓取力 基爪以双滚柱轴承为导向 确保低摩擦且平稳运行 优化的基本荷载额定值 适合使用长手指的机械手 通过电磁传感器进行监控 最大化工艺可靠性 沿着四个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 所有自动化系统均可用的灵活压力供应 紧凑尺寸 用于搬运中的最小干扰轮廓
SCHUNK SE & Co. KG

夹紧力: 123 N - 21,150 N
运行行程: 2 mm - 45 mm
描述 采用多齿导轨的通用型二指平动机械手,因此具有较大抓取力和高力矩 应用领域 多应用领域的最佳标准解决方案。可用于多尘环境的特殊型号。可用于多尘环境的特殊型号。 优点 - 为您带来的益处 稳定的多齿导轨 用于精确搬运 可能的最高力矩 适合使用长手指的机械手 椭圆形活塞传动原理 用于最大抓取力 沿着三个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 用于通用和灵活的机械手装配 种类齐全的传感器附件系列 用于多种查询方式及行程位置监控 紧凑尺寸 用于搬运中的最小干扰轮廓 多种选择 满足您特定使用需求的独特优化(防尘、高温、而腐蚀以及更多)
SCHUNK SE & Co. KG

夹紧力: 180 N - 8,750 N
运行行程: 2 µm - 25 µm
描述 带有永久润滑的通用型二指平动机械手,采用多齿导轨,因此具有较大的抓取力和最高的力矩。 应用领域 适于在通用应用中搬运工件的气动通用型机械手。可用于多尘环境的特殊型号。可用于多尘环境的特殊型号。 优点 - 为您带来的益处 稳定的多齿导轨 用于精确搬运 可能的最高力矩 适合使用长手指的机械手 多齿导轨中带有润滑槽 确定过程可靠性和延长的维护间隔 最大活塞表面积 用于最大抓取力 沿着三个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 用于通用和灵活的机械手装配 种类齐全的传感器附件系列 用于多种查询方式及行程位置监控 多种选择 满足您特定使用需求的独特优化(防尘、高温、而腐蚀以及更多)
SCHUNK SE & Co. KG

... 八达通真空抓取 杆的设计是为了进一步方便在码垛机器人上安装八达通真空抓取系统。 它们基于相同的操作原理,除了标准章鱼的优点和技术特点外,还配备了一个槽支撑板,可以快速安装在机器上,并且可以轻松定位相对于要抓取的负载。 实际上,它们由以下组成: -一个开槽阳极氧化铝固定板,用于快速安装到机器上 -一个或多个压缩空气输送真空发生器,具 有快速接头的连接器,用于向发电机输送压缩空气 -阳极氧化铝箱,一侧打开,在循环结束时有两个进气口连接,用于快速恢复大气压力,另一个用于安装真空开关。 ...

夹紧力: 70, 170 N
运行行程: 5 mm
... - 双作用平行夹钳,用于内部和外部夹持。 - 阳极氧化铝合金主体和回火钢爪。 - 底部或侧面固定。 - 所有尺寸都带有磁铁和传感器槽 每包数量:0 最低订购量。0 计量单位:件 执行器。 处理孔径(mm):20 最大输入压力(巴)。008 最高温度(摄氏度):70 最小输入压力 (bar):02 最低温度 (°C):05 ...
METAL WORK/麦特沃克

夹紧力: 135, 100, 45 N
运行行程: 5, 4, 7 mm
... 双作用系统,可在两个方向夹紧。所有的机械手都带有磁铁和传感器槽。 每包数量:0 最小订货量。0 计量单位:件 执行器。 处理孔径(毫米)。16 最高温度(℃): 80 最低温度 (°C): -10 产品系列:气动抓取器 尺寸:16 ...
METAL WORK/麦特沃克

夹紧力: 27, 50, 120, 380 N
... 孔径为16、20、32和50毫米。 所有的机械手都是磁性的,机身上有槽,有缩回的传感器。 每包数量:0 最小订货量。0 计量单位:件 执行器。 功能代号: 2 爪子气动抓取器 最大输入压力(巴)。010 最高温度(摄氏度): 80 最小输入压力(bar): 1.5 最低温度 (°C): -10 ...
METAL WORK/麦特沃克

... 广泛的灵活性 增加 FlexGripper-Claw 后,IRB 660 和结构紧凑的 IRB 460 码垛机器人在袋子码垛应用中更加有效。FlexGripper-Claw 最适合在涉及化学品和盐的最恶劣条件下使用,可处理重达 50 公斤的包装袋,以及从大米到碎石、从塑料到水泥等不同形状和内容物的包装袋。 易于集成,使用方便 FlexGrippers 易于安装和编程。机器人人机界面 FlexPendant 预先配置了 FlexGripper 输入/输出信号,大大减少了设置和编程时间。图形用户界面简化了码垛程序的测试。例如,只需点击一下鼠标,即可进行 ...

... 广泛的灵活性 IRB 660 和结构紧凑的 IRB 460码垛机器人可通过加装 FlexGripper(真空抓取器)更有效地进行末端码垛应用,可同时抓取 40 公斤和多达 10 个产品。 易于集成,使用方便 FlexGripper 易于安装和编程。机器人人机界面 FlexPendant 预先配置了 FlexGripper 输入/输出信号,大大减少了设置和编程时间。图形用户界面简化了码垛程序的测试。例如,只需单击鼠标即可进行 FlexGripper 取放测试。 更快、更准确的编程 RobotStudio ...
夹紧力: 0 kN - 1 kN
当需要测试不同材料时,特别那些对夹持力敏感的材料,必须夹持但材料不能有任何变化,气动夹具是特别有效的。 气动作动缸产生的夹持力直接作用于夹面上或者通过杠杆系统作用在试样上。 拉伸力和夹持力的分离保证在整个实验过程的恒定夹持力。对于易收缩的试样,由恒定气压恒定地维持夹持力。 与试样接触力是可再现的。 通过调节气压,可以安全地夹持敏感试样,避免夹面损坏。 最初的应力是拉伸载荷,可以是静态和脉动载荷。依照夹具的型号,可执行压缩和交变加载试验。 按照设计原理,夹持区域为无障碍。 大型夹具可以保留了小力值力传感器、试样夹具、试验工装和试验装置的安装位置,不需要拆卸试样夹具 ...

... 圆形杆末端执行器与 Quick-Lift System™ 集成后,符合人体工程学、工作环境、安全性和效率的最高标准。 无论负载重量如何,它们都具有出色的响应能力,使用方便。 内置节能功能。 内置真空不足警告功能、吹脱功能和大气压力功能,确保卓越的安全性。 可靠性高,经久耐用,性价比高。 圆杆末端执行器为快速、轻松的操作提供了强有力的解决方案。 产品 气动圆棒末端执行器,最大重量 30 公斤。 订货号: 1 015 204 010 气动圆棒末端效应器,最大 ...
Binar Handling AB

... 多功能真空末端执行器,与 Quick-Lift System™ 集成后,可满足人体工程学、工作环境、安全和效率方面的最高标准。 该末端效应器易于使用,其设计具有广泛的应用可能性。泡沫的形状与提升物体的表面相适应,这使得末端效应器可以满足许多不同的提升需求。 多功能真空末端效应器通过内置的真空不足警告功能、吹脱功能和大气压力功能提供卓越的安全性。 所有这些都有助于通过高可靠性和长期耐用性实现高成本效益。 提升能力 工作负载限制为 15 千克 末端执行器重量 9 ...
Binar Handling AB

... 可倾斜末端执行器与 Quick-Lift System™ 集成后,符合人体工程学、工作环境的最高标准、 安全和效率的最高标准。 无论负载重量如何,都能做出出色的反应,使用方便。内置节能功能。 内置真空不足警告功能、吹脱功能和常压功能,确保卓越的安全性。 可靠性高,经久耐用,性价比高。 快速简便的强大解决方案。 提升能力 适用于平整、高密度和不含油脂的材料。 材料。建议真空度为 60 kPa。 水平 - 最大85 千克 垂直 - 最大60 千克 温度 用于提升温度为 ...
Binar Handling AB

夹紧力: 140 N - 26,050 N
运行行程: 2 mm - 45 mm
• - 线型钢制导轨 — 性能优异的导轨设计 钢 / 钢导轨能够持久保持高精度,坚固耐用,且使用寿命长,维护间隔高达 3 千万次抓取循环。欢迎选购此款商品并从中获益,同时提高您机器的经济性及过程安全性。 • - 密封、防腐蚀 — 通用型抓手 几乎可用于所有环境条件,借助一个高达 IP67 密封等级的结构和标准化的防腐蚀工艺,您可将此机械夹爪应用于各类应用环境库存和生产成本。借此,您可避免在生产中频繁更换不同型号的机械夹爪,从而降低库存和生产成本。 • ...
ZIMMER GROUP/德国ZIMMER

夹紧力: 6 N - 400 N
运行行程: 1 mm - 12 mm
"强有力的" • - 力量可高出一般标准40% 最优的力和重量的平衡设计的结果是可以使用更小尺寸的部件来完成任务,从而减少了您的成本 • - 抓手手指可比一般标准最大长出50% 高保持力和高扭矩确保您使用的灵活性和应用的最大动态化 • - 无间断的持续工作 “德国制造”象征着我们决不妥协的质量要求,保证免维护运行一千万次循环
ZIMMER GROUP/德国ZIMMER

夹紧力: 8.4 N - 5,250 N
运行行程: 3 mm - 13 mm
"持久的" • - 经证实的技术 经过20年,产品通过应用证实了我们的可靠性,这 就意 味着我们的产品不会因质量而影响您的生产进程。 • - 非常短的循环周期 低摩擦的导杆确保非常长的使用周期,同时为机器提供最大的输出 • - 无间断的持续工作 “德国制造”象征着我们决不妥协的质量要求,保证免维护运行一千万次循环
ZIMMER GROUP/德国ZIMMER

夹紧力: 3,080 N - 6,950 N
运行行程: 14, 25 mm
... - 尺寸从50到380,每一种都有两个冲程的变体。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在供货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 楔形钩原理,采用气动驱动(可根据要求提供液压驱动)。 - 用电感式或磁性位置传感器进行位置监测 - 可选择使用FKM密封圈,用于高达150°C的高温(按要求)。 - 一体化的清洗空气接口,防止污染 通用抓取圆形和角形工件,有两个平行的抓取手指,可与机器人或门户一起处理。 - ...
RÖHM GmbH/罗姆

夹紧力: 650 N - 1,700 N
运行行程: 3, 6 mm
... - 尺寸从64到300,每一种都有两个冲程变量。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在交货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 气动驱动的楔形钩原理 - 可选择电感式和磁性位置传感器 - 可选择使用FKM密封圈,用于高达150°C的高温(根据要求) - 一体化的清洗空气接口,防止污染 圆形和圆柱形工件的通用抓取,有三个中心排列的抓手指头,可以用机器人或传送门处理。 - ...
RÖHM GmbH/罗姆

夹紧力: 1,200 N - 3,250 N
运行行程: 4, 8 mm
... - 尺寸从64到300,每一种都有两个冲程变量。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在交货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 气动驱动的楔形钩原理 - 可选择电感式和磁性位置传感器 - 可选择使用FKM密封圈,用于高达150°C的高温(根据要求) - 一体化的清洗空气接口,防止污染 圆形和圆柱形工件的通用抓取,有三个中心排列的抓手指头,可以用机器人或传送门处理。 - ...
RÖHM GmbH/罗姆

夹紧力: 50, 1, 2 N
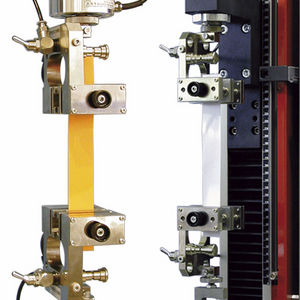
气动绳线夹具为夹持纤维、绳、纱线和细编织线提供了一种便捷的方式,可减少测试时相关材料在钳口处断裂的问题。光滑表面的羊角和渐开线夹块设计,便于装载试样并减少试样在夹持区域上受到的应力。夹紧机构可以自动闭合,也可以通过脚踏开关闭合。这样就可以腾出双手,便于装载试样。气动绳线夹具的夹持力可调节,适用于多种材料,并具有随动特性,保证不会因为试样蠕变而导致夹持力下降。 应用范围 加载类型:拉伸、静态和拉伸循环试验 不适用于高周疲劳试验 试样材料:细编织线、绳线、纱、单丝 试样形状:圆形
Instron/英斯特朗

夹紧力: 1, 3, 10 kN
... 气动楔形握把 Instron气动楔形夹具可用于静态或动态材料测试应用,可互换的楔形夹具面可容纳平面或圆形试样。 该夹具的设计是为了在不给试样引入轴向预载的情况下牢牢地抓住试样。这是通过使用仅在水平方向上相对于试样移动的钳口面来实现的。 操作原理 每个夹具的功能都是独立的,由外部液压系统提供压力来打开和关闭夹具。 当施加抓取压力时,试样/爪面的相对垂直位置保持不变,以防止在抓取过程中产生试样负荷。 一旦抓取面接触到试样,液压就会在抓取头上产生一个垂直力。抓取力将保持恒定,因为该设计自动补偿了试样厚度的变化。 ...
Instron/英斯特朗

... 气动楔形动作夹持器的特点是前部为开放式设计,便于装载大型试样。该系列可容纳直径达60毫米(2.36英寸)的圆形试样和厚度达70毫米(2.75英寸)的扁平试样。这些气动楔形夹具的紧凑设计,在安装在Instron的地面模型测试系统上时,可以最佳地利用测试区域。 特别适合于可能存在灰尘和金属碎片的工业环境,这些夹具有保护性的防尘罩,可以很容易地套在表面上,以保护移动表面。可选的背负式适配器板提供了一种有效的方法,用于安装次级负载串,以进行低容量测试,而无需拆除较大的握把。 在2716-110和2716-120握把上,用于圆形试样的Ve面在设计上减少了中心区域,这影响了它们吸收高能量断裂而不断裂的能力。这种握把采用了一个分叉的面状结构,可以在不损坏面状结构的情况下消散断裂能量。在W-5180和W-5190握把上,由于尺寸大大增加,可以使用一体式设计的握把面。 ...
Instron/英斯特朗

夹紧力: 651 N
... 握力(磅) 146.0 精确度_英文 0.0036 重量(磅) 4.01 排量(立方英尺) 5.614 气缸孔径(英寸) 1.97 重复性(± 英寸) 0.002 最大指针长度(英寸) 8.5 压力范围(磅/平方英寸) 40-100 弹簧辅助 无 经销商集团 机械手抓取解决方案 下载服务手册 https://www.destaco.com/assets/pdfs/maintenance/CT_Maintenance.pdf 产品重量 4.01 温度范围 标准 -35° ...
DE-STA-CO

夹紧力: 35 daN
... COVAL 的 CVGC 碳纤维真空抓手采用创新设计,完全符合协作机器人应用的重量限制、灵活性和安全性要求。 协作机器人应用的重量限制、灵活性和安全性。 凭借创新设计,CVGC 系列在以下方面脱颖而出: .碳纤维结构,重量是铝的 2.5 倍,机械强度是铝的 6 倍。 机械强度是铝的 6 倍。 .抓手边缘采用软质材料,可同时保护抓手和操作员。 .可选择抓取界面(吸盘或泡沫)。 .带或不带集成真空发生器的型号。 所有这些都集成在一个非常紧凑和超轻的设计中,很容易安装在机器人上 机器人上,确保快速安装。 三种标准尺寸使您能够选择最适合您要求的 ...
COVAL/库沃

夹紧力: 4 kgf - 60 kgf
... PA 系列角爪卡箍用于机器人和塑料工业,更广泛地应用于各类机械手。特别推荐在注塑机卸载机器人上使用。 选择理论夹紧力至少为所需有效夹紧力两倍的夹钳。上表中的夹紧力为理论夹紧力,压力为 6 巴。抓取力与抓取点和支点之间的距离成反比。 例如,PA 20 卡箍的夹持点距支点 25 毫米,则夹持力为 F = 10.1(下表)x 15/25 = 6.06 公斤。 被搬运物体的重量与夹钳的重量相加,不得超过夹持点所受力的 1/20。手指的开合速度可通过压缩空气调节器进行调节。 .DE:使用压缩空气的双作用夹钳。 .SEF:通过压缩空气闭合,通过回位弹簧打开(简单闭合效果)。 .SE0:通过压缩空气打开,通过回位弹簧关闭(简单的打开效果)。 规格 压缩空气:过滤、润滑或无润滑 最大压力:10 ...
COVAL/库沃

夹紧力: 600 N - 2,200 N
... Coval的CVGL系列是一种真空抓取器,具有灵活、简单和经济的特点。它包含的处理部件有不同的尺寸、形状和重量。使用这种工具,用户能够以简单的方式对不同的部件进行随机抓取,但又很安全。 ...
COVAL/库沃

夹紧力: 150 N - 10,750 N
运行行程: 5 mm - 70 mm
... 坚固耐用/10种尺寸 精度+/- 0.015毫米 可调节的行程 IP等级40 ....65 总行程控制 维护抓取力的装置 加压 高达130°C的版本 ...
OMIL

夹紧力: 110 N - 3,040 N
运行行程: 4 mm - 32 mm
... 双指平行抓取器 受保护 等级IP67 维护抓取力的装置 高达130°C的版本 ...
OMIL

夹紧力: 60, 100, 190 N
运行行程: 3, 6, 13 mm
... 双指平行抓取器 卓越的行程/抓取力比率 抓取力从80克起 行程从8毫米到42毫米 等级IP40 维护抓取力的装置 加压 高达130°C的版本 ...
OMIL

夹紧力: 60, 115, 200, 340 N
运行行程: 4.5, 6, 8, 10 mm
... 搬运气动夹具,采用两个同心指平行夹紧。 导轨为棱柱形,机构受到完全保护。 选项 : 磁性检测(T 形槽) 双指平行紧固的优点 这种平行夹具的夹持方式是最通用的夹持方式:它可以用相同的夹爪夹持尺寸略有不同的工件,可以在开口处的有限空间内抓取工件,可以从内侧或外侧抓取工件...... 对于不同尺寸的工件,可以使用 25 型平行长行程夹钳在不更换夹爪的情况下夹持。 24 型平行夹爪的可靠性和坚固性 硬质阳极氧化机身和气缸、棱柱钢导轨、全保护机构,这些气动平行机械手坚固可靠。 由于气缸上表面有 ...
AVM AUTOMATION

夹紧力: 60 N - 200 N
运行行程: 4.5 mm - 8 mm
... 搬运气动夹具,采用 3 根同心指平行夹紧。 导轨为棱柱形,机构受到完全保护 选项 : 磁性检测(T 形槽) 三指平行拧紧的优点 虽然大多数搬运应用都使用双指平行机械手,但即使是圆柱形工件,V 形爪也能很好地抓取。在以下两种情况下,最好使用三指夹具: - 拧紧过程中工件沿两个轴重新聚焦 - 长圆柱形工件端部夹持的稳定性 在拧紧的特殊情况下,我们有一系列专门用于拧紧的三爪机械手:2913 型机械手。 24 型平行机械手的可靠性和坚固性 这些气动平行机械手的机身和气缸经过硬质阳极氧化处理,采用棱柱钢导轨,机械装置受到全面保护,因此坚固可靠。 由于气缸上表面有 ...
AVM AUTOMATION

夹紧力: 60, 170, 435, 990 N
运行行程: 12 mm - 120 mm
... 气动平行夹钳,带 2 个同心手指和较长的张开行程。 超长棱柱导轨,可抵抗扭转扭矩。 超长的长度/行程比 选项 : 极端位置上的感应式传感器 长行程平行机械手的优势 这种气动平行机械手具有较长的张开行程,可以抓取不同尺寸的工件(例如:各种轴承、各种轮子......)。 滑块的长度使其能够支撑相当长的夹爪,而不会有对接的风险。 卓越的长度/行程比和坚固性 在整个行程中,夹紧力和导向质量都是恒定的。由于滑块平行安装,因此这些夹钳具有非常好的行程/长度比。 采用硬质阳极氧化处理的机身和长棱柱钢导轨,这些平行气动机械手性能可靠、坚固耐用。 安装接口可将它们集成到气动处理组件中。 ...
AVM AUTOMATION

... 由于我们定制的工业夹持管,SIMTECH为您的中空玻璃生产线提供完整的夹持和码垛/卸垛系统。无论您是装瓶商还是机器制造商,我们都能帮助您优化您的技术。我们的技术诀窍是世界公认的,我们提供研究并最大限度地提高您的工艺,以便为您提供定制的解决方案。 每个应用都有自己的限制和要求。无论你的应用是什么,我们的工程办公室将集中精力提供最好的解决方案,以最大限度地提高你的码垛和卸垛的生产率。 通过向我们提供你的应用的技术规格,我们能够定制和调整我们的抓斗管。无论我们的抓斗管的长度、直径、供应接口的数量或添加加固物,我们的产品的定制是没有限制的。它们同样适用于我们的工业码垛机。我们可以调整尺寸、连接或形状。 通过研究并与您分享我们在生产过程中的先进知识和我们的自动化解决方案,我们可以为您节省时间并解决您在生产过程中可能遇到的问题。 我们随时准备为您开发定制的工业抓取管,最好地满足您的期望。 ...
Simtech

运行行程: 28, 33, 38 mm
... 用于所有类型瓶颈的GGS型夹持器管是以2个充气棒的形式出现的,配备有连接压缩空气的接头,并有螺纹紧固件。GGS型夹持器可快速、方便地安装在您的机器上。它便于处理所有类型的瓶子组合。组成夹持器的充气管可以承受高达1.2巴的压力。世界各地的许多用户都在使用和推荐这一实用系统。 用户/用途 装瓶。卸下一排排的瓶子 瓶子制造商。码垛一排排的瓶子 一般工业。(其他容器(塑料容器、纸板容器、PET......)的(去)码垛 技术特点 我们的抓取器是用聚合物涂层织物基材制造的,并在制造过程中进行了硫化处理,使其具有超强的强度,并保证其具有很长的使用寿命。 有几种充气直径可供选择:在标准尺寸中,我们提供28mm、33mm和38mm。对于任何其他直径,请咨询我们。 标准的GGS夹持器长1340毫米,有3个M10x70毫米的连接点(连接点之间的中心间距为510毫米),有一个300毫米长的供应软管。 我们还生产1470毫米长的GGLS抓斗,或为非标准托盘生产其他长度的抓斗。 性能 我们的GGS抓取器可以移动一排排和一层层的瓶子。根据要求,它们可以提供手柄、控制按钮、压力表和安装环。它们由2个侧面组成,用M10螺纹紧固件的板连接。配备有向内充气的气缸,这种聪明的夹持器有一个可调节的高度和中心间距,当你想限制处理时间时,这是一个重要的资产。 ...
Simtech

运行行程: 28 mm - 88 mm
... 用于抓取瓶子的 GGF(A)型抓取管是一个充气圆筒,配有用于连接压缩空气的供气装置和螺纹紧固件,可快速安装在抓取头上。由于其有效长度,它主要用于大多数标准长颈瓶,如葡萄酒瓶、啤酒瓶等。 它已在全球范围内得到验证。 用户/用途 装瓶:瓶子的拆垛 瓶子制造商瓶子码垛 一般工业:各种容器(塑料容器、纸板容器、PET......)的(拆)码垛 技术特点 我们用于抓取瓶子的抓取管是用高耐磨聚合物涂层织物基材制造的,然后经过硫化处理。我们的 GGF 夹持管具有厚实的强化胶橡胶管体和粗糙的外观,因此使用寿命长且更加坚固耐用。此外,我们的 ...
Simtech

... 橡胶袋 橡胶袋 Categories: (De)palletiser, Bottler, Decorator, Glass Factory ...
System Res

... 橡胶袋 橡胶袋 Categories: (De)palletiser, Bottler, Decorator, Glass Factory ...
System Res

... 橡胶袋 橡胶袋 分类: (去)码垛机, 装瓶机, 装饰机, 玻璃厂 产品描述 产品描述 气袋,尤其适用于微型产品或瓶颈与瓶子之间空间狭小的情况 ...
System Res



夹紧力: 19 N - 158 N
运行行程: 8 mm - 80 mm
... 低矮的设计节省了空间,减少了弯曲力矩,并通过平稳的操作提高了精度。每种孔径都有三种标准冲程长度(短、中、长)可供选择。 -孔径8、12、16、20 毫米 -可调节冲程选项 -可自动开关 -可选 NSF-H1 食品级润滑油 ...

运行行程: 5 mm - 105 mm
... BLQ是一种橡胶抓取器,其特点是采用充气式橡胶囊结构,使每个模型能够操纵大量的形状。 优势 -BLQ-E:一个抓手可处理多种尺寸的零件,因为它能抓取其放气直径40%的物体。 -BLQ-I:可将其直径增加到放气后的1.86倍,从而使一个机械手可以处理多种尺寸的零件。 -通过控制膀胱内的压力大小进行精细的处理。 -由于夹持力分布在大面积上,即使是重物也有柔软安全的触感。 -由于橡胶和空气的柔软触感,接触不伤人,特别适合玻璃和塑料物体。 -尺寸范围广,可处理内径为8.5至105毫米的物体。 -不需要润滑。 -由于没有密封件或轴承,即使在多尘的环境中也有很长的使用寿命。 *预处理:末端效应器必须在最大的推荐工作压力下无阻力地充气,最多30次。 **负载能力是在最大允许压力下的工作直径范围内评估的 工作压力 ...
Effecto Group S.p.A.

夹紧力: 140.61 kgf
运行行程: 14 in
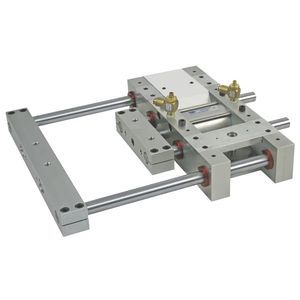
... 用于大部件和长行程的平行钳口运动 LPG 系列是 EZ 系列线性滑轨的改进版,用于抓取。这些夹具有多种配置,可支持重负荷和大型工件。工具栏以绝对的平行度和精确的同步运动相互伸出和缩回。该系列的中心定位精度在 0.002 英寸重复精度范围内,几乎可以实现 "无间隙 "抓取。 主要规格 特点 - 提供 1 ⅛ 英寸和 2 英寸内孔尺寸 - 工作压力标准为 100 psi - 工作介质:压缩空气 - 中心定位精度在 0.002 英寸重复精度范围内 - 可调节的夹钳卡爪止动装置 技术优势 - ...
FABCO-AIR/美国Fabco-Air

... acubez™抓取器的完整产品线提供了广泛的多功能抓取解决方案选择,以适应自动化制造过程中几乎所有的形状和材料,特别是自动化机器趋向的拾取和放置应用。 抓手是EOAT的典型类型,为自动化数控机床的操作提供了高度的通用性:装载和卸载机床,取放应用,以及准备检查成品工件。每个acubez™臂端工具(EOAT)都与系统完全同步,可以立即使用,提供了一个灵活的、端到端的数控自动化解决方案。 Acubez™臂端工装的优势: 广泛的EOATS:双抓手、平行抓手、真空抓手等 ...
请说明:
您的建议是我们进步的动力:
剩余字数