
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

夹紧力: 375 N - 4,200 N
运行行程: 20 mm - 75 mm
描述 通用机械手,由于多齿导轨,具有较长行程和较高的最大力矩 应用领域 由于附件品种丰富,因此实现了通用。可用于对机械手有特殊需求的应用领域(温度、耐化学性、灰尘等)。 优点 - 为您带来的益处 稳定的多齿导轨 用于精确搬运 可能的最高力矩 适合使用长手指的机械手 抓取灵敏 用于搬运大型灵敏工件 通过无软管直接接口或螺旋接口供应气源 所有自动化系统均可用的灵活压力供应 种类齐全的传感器附件系列 用于多种查询方式及行程位置监控 大行程 部件范围灵活 扁平化设计 轮廓干扰性小 中心通孔 用于工件导孔、输送软管、传感器系统、光学工件识别系统等。

夹紧力: 36 N - 2,400 N
运行行程: 1.2 mm - 20.5 mm
... - 双作用驱动。 - 结构坚固,适用于重型应用,使用寿命长,无需维护。 - 行程长度和抓取力选择范围广。 - 在总行程的两个方向上,抓取力都是恒定的。 - 扁平外形。 - 法兰上的通孔便于紧固。 - 行程可调 - 可选磁性传感器。 - FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

夹紧力: 36 N - 2,400 N
运行行程: 1.2 mm - 20.5 mm
... - 双作用驱动。 - 结构坚固,适用于重型应用,使用寿命长,无需维护。 - 行程长度和抓取力选择范围广。 - 在总行程的两个方向上,抓取力都是恒定的。 - 扁平外形。 - 可安装感应式传感器。 - FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

夹紧力: 180 N - 1,660 N
运行行程: 2.5 mm - 15 mm
... - 扁平轮廓。 - 坚固的导轨。 - 抓取力大。 - 重量和尺寸小 - 尺寸精度高。 - 也可提供弹簧闭合式 (-NC) 或弹簧开启式 (-NO)。 - FDA-H1 食品级润滑脂。 ...
GIMATIC/意大利GIMATIC

... 液压楔形动作夹持器的特点是前部为开放式设计,便于装载大型试样。该系列可容纳直径达90毫米(3.54英寸)的圆形试样和厚度达90毫米(3.54英寸)的扁平试样,能力范围从300kN(67500磅)到2000kN(450000磅)。 特别适用于可能存在灰尘和金属碎片的工业环境,这些抓斗有保护性的防尘罩,可以很容易地套在表面上,以保护移动表面。可选的适配器板提供了一种有效的方法,用于安装次级负载串,以进行低容量测试或其他夹具,而无需拆除较大的握把。 操作原理 这些握把是通过握把前面的手动旋转旋钮进行液压操作的。在关闭或打开的过程中,夹持器主体不会移动。液压供应通常来自于主机器框架,通过一个握柄副歧管。卡爪是可分离的嵌件,装在卡爪架上,易于安装,更换卡爪面时不需要重新上油。握把体有润滑脂接头,在需要时可以方便地重新给载体上油。W-5380和W-5390具有磁性座架。 应用范围 载荷类型:拉力,*不适合通零/反向应力或疲劳测试 试样材料:金属 试样形状:平面、圆形 ...

夹紧力: 1, 3, 10 kN
... 气动楔形握把 Instron气动楔形夹具可用于静态或动态材料测试应用,可互换的楔形夹具面可容纳平面或圆形试样。 该夹具的设计是为了在不给试样引入轴向预载的情况下牢牢地抓住试样。这是通过使用仅在水平方向上相对于试样移动的钳口面来实现的。 操作原理 每个夹具的功能都是独立的,由外部液压系统提供压力来打开和关闭夹具。 当施加抓取压力时,试样/爪面的相对垂直位置保持不变,以防止在抓取过程中产生试样负荷。 一旦抓取面接触到试样,液压就会在抓取头上产生一个垂直力。抓取力将保持恒定,因为该设计自动补偿了试样厚度的变化。 ...

... 气动楔形动作夹持器的特点是前部为开放式设计,便于装载大型试样。该系列可容纳直径达60毫米(2.36英寸)的圆形试样和厚度达70毫米(2.75英寸)的扁平试样。这些气动楔形夹具的紧凑设计,在安装在Instron的地面模型测试系统上时,可以最佳地利用测试区域。 特别适合于可能存在灰尘和金属碎片的工业环境,这些夹具有保护性的防尘罩,可以很容易地套在表面上,以保护移动表面。可选的背负式适配器板提供了一种有效的方法,用于安装次级负载串,以进行低容量测试,而无需拆除较大的握把。 在2716-110和2716-120握把上,用于圆形试样的Ve面在设计上减少了中心区域,这影响了它们吸收高能量断裂而不断裂的能力。这种握把采用了一个分叉的面状结构,可以在不损坏面状结构的情况下消散断裂能量。在W-5180和W-5190握把上,由于尺寸大大增加,可以使用一体式设计的握把面。 ...
夹紧力: 2,000 N
运行行程: 62.5 mm - 150 mm
"强有力的" • - 可匹配更长更重的手指 尽管采用扁平结构,但在机器装载大型工件(例如发动机缸体或轮辋)时几乎对夹爪手指的设计没有限制 • - 同步、非同步和工件固定 选择夹爪手指同步或异步运动并通过集成的夹紧元件提高过程安全性,以在压力下降时固定工件 • - 防尘 导轨上配备了除屑器, 在最恶劣的环境下您可以放心使用抓手。

夹紧力: 35 N
运行行程: 0 mm - 6 mm
• - 灵活的行程调整 通过直接对针的调节可独立平滑的调节针的行程 • - 扁平结构 它的紧凑的外形设计帮助您节省了您设备中的宝贵空间 • - 磁性传感器技术 终端位置检测使您能达到更快的循环周期, 并且拥有一个内置的控制系统

夹紧力: 140 N - 400 N
运行行程: 80 mm
PGHL系列是大寰自主研发生产的工业扁电爪, 以其精巧的结构设计, 大负载和高力控精度, 可适用更多大负载夹取需求,适用更多应用场景。 尺寸小 重量轻 Z和Y方向尺寸紧凑,本体重量轻,降低载体的负载和惯性力矩,实现设备轻量化,提高运行速度 大夹持力 大行程 大负载 单侧夹持力可达,可承受负载8kg,大行程可夹持多种尺寸,参数柔性适合产线换型 机械自锁 安全可靠 掉电自锁夹持力保持大于95%,避免异常掉电工件掉落 工况模拟测试 实现在机械臂上大负载翻转和搬运及在模组上快速搬运(速度 ...

SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 φb - 200 Wn - 40 Dn - 22-133 Lb - 68.2 Lt - 62.7 Ln - 86.5 L - 62.5 Smax - 25 Ymax - 36 Dn+2Smax - 22-183 负载g ...
Soft Robot Tech Co.,Ltd

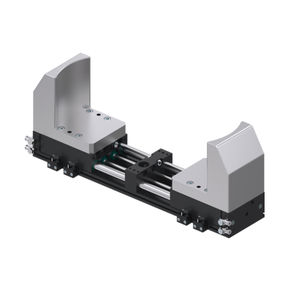
夹紧力: 155 N - 1,550 N
运行行程: 19 mm - 114 mm
... 带有大行程和密封滑动导轨的多用途双爪平行机械手 特点 - 扁平结构 - 坚固的结构和密封的圆形导轨 - 可从两边安装机械手 - 冲程大,可达114毫米 操作原理 爪子的平行运动是由齿轮/齿条驱动产生的,使用两个双作用的气缸。爪子由齿条和导杆与滑块引导的活塞杆相结合进行引导。 ...
请说明:
您的建议是我们进步的动力:
剩余字数