
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

夹紧力: 15 N - 225 N
运行行程: 20 mm - 160 mm
双作用 工作压力2 ÷ 8 bar(规格 10 的为 3 ÷ 8 bar) 工作温度5 ÷ 60°C 润滑润滑或不润滑 重复精度± 0.1 mm 理论夹持力(N)* * 理论夹持力以工作压力为 0.5 MPa,夹持点力臂 R = 40 mm(Ø 10, 16, 20, 25)或 R = 80 mm(Ø 32)计算所得。10 16 20 25 32 接口M5 M5 M5 M5 G1/8 介质15 45 75 125 225
CAMOZZI AUTOMATION/康茂胜

结构形式 - T 型导轨定心式平行爪钳 与介质接触的材料 - 单作用(常开或常闭),双作用 工作压力 - 2 ÷ 8 bar (双作用), 4 ÷ 8 bar (单作用) 工作温度 - 5°C ÷ 60°C (标准型) - 5°C ÷ 150°C (高温型) 介质 - 洁净空气,无需使用(过滤精度等级符合 ISO 8573-1 7.4.4) 如果使用了油雾润滑,应不间断的使用油雾润滑(建议使用 ISO VG32 润滑油) 润滑 - 经过一千万次循环动作后,请使用 ...
CAMOZZI AUTOMATION/康茂胜

CGPS 系列双滚珠导轨自定心平行式爪 钳采用高精度传动系统,可实现大夹持力的 输出,具有高重复精度和鲁棒性的特点(可 承受较大的外部静态和动态负载)。 CGPS 系列有多种规格可供选择,可为 不同的应用提供最佳的解决方案。爪钳可提 供安装在爪钳本体或爪指上的定心轴套和定 心环(公差等级 H8),保证用户在维修或 更换时具有很好的互换性。 结构形式 - T 型导轨定心式平行爪钳 与介质接触的材料 - 双作用 规格 - 50, 64, 80, 100, ...
CAMOZZI AUTOMATION/康茂胜

... 广泛的灵活性 增加 FlexGripper-Claw 后,IRB 660 和结构紧凑的 IRB 460 码垛机器人在袋子码垛应用中更加有效。FlexGripper-Claw 最适合在涉及化学品和盐的最恶劣条件下使用,可处理重达 50 公斤的包装袋,以及从大米到碎石、从塑料到水泥等不同形状和内容物的包装袋。 易于集成,使用方便 FlexGrippers 易于安装和编程。机器人人机界面 FlexPendant 预先配置了 FlexGripper 输入/输出信号,大大减少了设置和编程时间。图形用户界面简化了码垛程序的测试。例如,只需点击一下鼠标,即可进行 ...

... 广泛的灵活性 IRB 660 和结构紧凑的 IRB 460码垛机器人可通过加装 FlexGripper(真空抓取器)更有效地进行末端码垛应用,可同时抓取 40 公斤和多达 10 个产品。 易于集成,使用方便 FlexGripper 易于安装和编程。机器人人机界面 FlexPendant 预先配置了 FlexGripper 输入/输出信号,大大减少了设置和编程时间。图形用户界面简化了码垛程序的测试。例如,只需单击鼠标即可进行 FlexGripper 取放测试。 更快、更准确的编程 RobotStudio ...

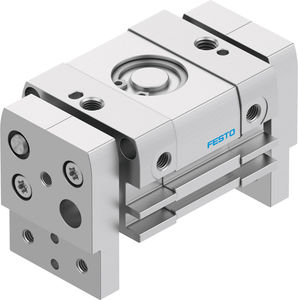
描述 基爪在滚子轴承导轨上平稳运行的二指平动机械手 应用领域 在低污染环境中抓取和移动中小型工件,例如装配、测试、实验室和制药行业 优点 - 为您带来的益处 交叉滚子导轨 用于通过无间隙基爪导轨实现精确抓取 椭圆形活塞传动原理 用于最大抓取力 基爪以双滚柱轴承为导向 确保低摩擦且平稳运行 优化的基本荷载额定值 适合使用长手指的机械手 通过电磁传感器进行监控 最大化工艺可靠性 沿着四个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 所有自动化系统均可用的灵活压力供应 紧凑尺寸 用于搬运中的最小干扰轮廓
SCHUNK SE & Co. KG

夹紧力: 123 N - 21,150 N
运行行程: 2 mm - 45 mm
描述 采用多齿导轨的通用型二指平动机械手,因此具有较大抓取力和高力矩 应用领域 多应用领域的最佳标准解决方案。可用于多尘环境的特殊型号。可用于多尘环境的特殊型号。 优点 - 为您带来的益处 稳定的多齿导轨 用于精确搬运 可能的最高力矩 适合使用长手指的机械手 椭圆形活塞传动原理 用于最大抓取力 沿着三个螺钉方向从两侧安装 用于通用和灵活的机械手装配 通过无软管直接接口或螺旋接口供应气源 用于通用和灵活的机械手装配 种类齐全的传感器附件系列 用于多种查询方式及行程位置监控 紧凑尺寸 用于搬运中的最小干扰轮廓 多种选择 满足您特定使用需求的独特优化(防尘、高温、而腐蚀以及更多)
SCHUNK SE & Co. KG

夹紧力: 110 N - 11,250 N
运行行程: 2 mm - 45 mm
描述 密封型二指平动机械手,满足 IP67 防护等级要求,能够避免异物进入工作环境。 应用领域 机械手非常适用于搬运粗糙或脏污工件。其应用范围增加了机械装卸,例如卫生块、磨床、车床或铣床,完成涂装厂、粉末加工或水下搬运任务。 优点 - 为您带来的益处 稳定的内部多齿导轨 用于精确抓取各类工件 外部圆形导轨处的唇形密封 用于永久性牢固机械手密封 可能的最高力矩 适合使用长手指的机械手 密封的二指平动机械手 尽管力矩负载高,但是符合 IP67 ...
SCHUNK SE & Co. KG
夹紧力: 27 N - 508 N
运行行程: 20 mm - 200 mm
... - 由于有导向的夹钳,所以抗扭矩能力强 - 紧凑而坚固的设计 - 是抓取大型零件的理想选择 - 双作用的活塞式推杆 - 适用于外部和内部抓取 - 安装:通过螺纹直接紧固,带通孔 - 对于T型槽和C型槽,可使用接近传感器进行位置感应 - 由于减少了材料的使用,在生产中具有可持续性 ...
夹紧力: 10.4 N - 777.2 N
运行行程: 2 mm - 15 mm
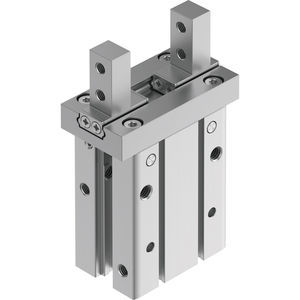
... - 弹性和精确的导球器 - 高抓取力和紧凑的尺寸 - 最大的重复精度 - 可作为双动或单动机械手使用 - 单动式变体或带有抓取力保证的常开(NO)或常闭(NC)。 - 适用于外部和内部抓取 - 多种多样的安装和附件选择 - 由于减少了材料的使用,在生产中具有可持续性 ...

夹紧力: 85 N - 19,275 N
运行行程: 3 mm - 30 mm
"经济型" • - 专注于重点 最经济的抓取形式:这是您降低生产成本的办法 • - 经证实的T型导轨 经过考量和实践证实我们的导轨技术在业内是最可靠 的 • - 紧凑的结构 减少您应用中的外形干涉
ZIMMER GROUP/德国ZIMMER

夹紧力: 370 N - 3,400 N
运行行程: 40 mm - 200 mm
"强固" • - 在抓手手指设计合理的前提下,压力下降时通过夹紧元件固定工件 • - 尺寸基于 GH6000 系列标准抓手 • - 长行程,单边行程最大200mm • - 稳固的 T 型导槽,贯穿整个外壳长度 • - 适用于长度不超过 600 mm 的抓手手指 • - 凭借重叠排列的气缸和导轨实现紧凑的结构型式
ZIMMER GROUP/德国ZIMMER

夹紧力: 200 N - 34,700 N
运行行程: 3 mm - 30 mm
"经济型" • - 专注于重点 最经济的抓取形式:这是您降低生产成本的办法 • - 经证实的T型导轨 经过考量和实践证实我们的导轨技术在业内是最可靠 的 • - 紧凑的结构 减少您应用中的外形干涉
ZIMMER GROUP/德国ZIMMER

夹紧力: 208 N - 505 N
运行行程: 2, 4 mm
... - 尺寸从50到380,每一种都有两个冲程的变体。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在供货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 楔形钩原理,采用气动驱动(可根据要求提供液压驱动)。 - 用电感式或磁性位置传感器进行位置监测 - 可选择使用FKM密封圈,用于高达150°C的高温(按要求)。 - 一体化的清洗空气接口,防止污染 通用抓取圆形和角形工件,有两个平行的抓取手指,可与机器人或门户一起处理。 - ...
RÖHM GmbH/罗姆

夹紧力: 316 N - 932 N
运行行程: 3, 6 mm
... - 尺寸从50到380,每一种都有两个冲程的变体。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在供货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 气动驱动的楔形钩原理(可根据要求提供液压驱动)。 - 用电感式或磁性位置传感器进行位置监测 - 可选择使用FKM密封圈,用于高达150°C的高温(根据要求)。 - 一体化的清洗空气接口,防止污染 通用抓取圆形和角形工件,有两个平行的抓取手指,可与机器人或门户一起处理。 - ...
RÖHM GmbH/罗姆

夹紧力: 470 N - 1,236 N
运行行程: 4, 8 mm
... - 尺寸从50到380,每一种都有两个冲程的变体。可选择带抓取力安全装置和/或防尘罩。 - 通过定心套(包括在供货范围内)来固定抓取手指。 - 紧凑设计的中心夹持,由高强度的硬涂层铝合金制成 - 所有功能部件均由硬化钢制成,以达到最大的使用寿命 - 气动驱动的楔形钩原理(可根据要求提供液压驱动)。 - 用电感式或磁性位置传感器进行位置监测 - 可选择使用FKM密封圈,用于高达150°C的高温(根据要求)。 - 一体化的清洗空气接口,防止污染 通用抓取圆形和角形工件,有两个平行的抓取手指,可与机器人或门户一起处理。 - ...
RÖHM GmbH/罗姆

... 气动楔形动作夹持器的特点是前部为开放式设计,便于装载大型试样。该系列可容纳直径达60毫米(2.36英寸)的圆形试样和厚度达70毫米(2.75英寸)的扁平试样。这些气动楔形夹具的紧凑设计,在安装在Instron的地面模型测试系统上时,可以最佳地利用测试区域。 特别适合于可能存在灰尘和金属碎片的工业环境,这些夹具有保护性的防尘罩,可以很容易地套在表面上,以保护移动表面。可选的背负式适配器板提供了一种有效的方法,用于安装次级负载串,以进行低容量测试,而无需拆除较大的握把。 在2716-110和2716-120握把上,用于圆形试样的Ve面在设计上减少了中心区域,这影响了它们吸收高能量断裂而不断裂的能力。这种握把采用了一个分叉的面状结构,可以在不损坏面状结构的情况下消散断裂能量。在W-5180和W-5190握把上,由于尺寸大大增加,可以使用一体式设计的握把面。 ...

... 用于工程和制造业的紧凑型电动双爪平行机械手 - RPE系列 这些电动并联机械手具有弹簧关闭功能,可以在断电情况下获得全部抓取力。它们需要简单的24VDC脉冲信号,不需要可编程的或昂贵的控制器。还可提供可调节的电感式接近传感器。很容易集成到目前的工程和制造工艺中。它们的紧凑设计允许在小空间抓取小零件。预载的 "双V "滚子轴承消除了侧滑,使零件位置的重复性极佳。低摩擦机制允许可重复的抓取力,用于抓取脆弱的部件。抓取力在整个行程中是恒定的。抗腐蚀保护罩保护着驱动和轴承机构。所有的内部部件都用Krytox™润滑脂进行润滑。所有运动部件都位于防腐蚀罩内。 安装简单快速,不需要软件 能源效率高,减少操作成本 比气动抓取器更容易操作和控制 DPE-200-25适用于ISO ...

夹紧力: 35 daN
... COVAL 的 CVGC 碳纤维真空抓手采用创新设计,完全符合协作机器人应用的重量限制、灵活性和安全性要求。 协作机器人应用的重量限制、灵活性和安全性。 凭借创新设计,CVGC 系列在以下方面脱颖而出: .碳纤维结构,重量是铝的 2.5 倍,机械强度是铝的 6 倍。 机械强度是铝的 6 倍。 .抓手边缘采用软质材料,可同时保护抓手和操作员。 .可选择抓取界面(吸盘或泡沫)。 .带或不带集成真空发生器的型号。 所有这些都集成在一个非常紧凑和超轻的设计中,很容易安装在机器人上 机器人上,确保快速安装。 三种标准尺寸使您能够选择最适合您要求的 ...

夹紧力: 4 kgf - 60 kgf
... PA 系列角爪卡箍用于机器人和塑料工业,更广泛地应用于各类机械手。特别推荐在注塑机卸载机器人上使用。 选择理论夹紧力至少为所需有效夹紧力两倍的夹钳。上表中的夹紧力为理论夹紧力,压力为 6 巴。抓取力与抓取点和支点之间的距离成反比。 例如,PA 20 卡箍的夹持点距支点 25 毫米,则夹持力为 F = 10.1(下表)x 15/25 = 6.06 公斤。 被搬运物体的重量与夹钳的重量相加,不得超过夹持点所受力的 1/20。手指的开合速度可通过压缩空气调节器进行调节。 .DE:使用压缩空气的双作用夹钳。 .SEF:通过压缩空气闭合,通过回位弹簧打开(简单闭合效果)。 .SE0:通过压缩空气打开,通过回位弹簧关闭(简单的打开效果)。 规格 压缩空气:过滤、润滑或无润滑 最大压力:10 ...

夹紧力: 110 N - 3,040 N
运行行程: 4 mm - 32 mm
... 双指平行抓取器 受保护 等级IP67 维护抓取力的装置 高达130°C的版本 ...
OMIL

夹紧力: 123 N - 3,200 N
运行行程: 4 mm - 32 mm
... 廉价 可调节的行程 等级IP40 维护抓取力的装置 加压 高达130°C的版本 ...
OMIL

夹紧力: 95, 170, 270 N
运行行程: 12 mm - 80 mm
... 双指平行抓取器 成本效益高 重量轻 行程可达80毫米 力达270 N 等级IP20 ...
OMIL

夹紧力: 300 N
用于安全、精确的协作式应用的多功能电磁夹持器 电磁夹持器使用开箱即用部署,简单快速,没有外部空气供给成本 内置智能化功能,可轻松调节磁力和零件检测,能够可靠处理各种尺寸和重量的零件 夹持器灵活、紧凑且可定制,可以满足您的一切需求 即使在断电或紧急停止后,仍可保持夹持力,确保操作安全、可靠 为何选择 MG10 夹持器? OnRobot 的 MG10 电磁夹持器功能众多、易于使用,适用于制造、汽车和航空航天环境中的材料搬运、组装和机床管理。MG10 ...
OnRobot ApS

夹紧力: 0.8 N - 50 N
运行行程: 12 mm - 26 mm
PGE 系列是大寰自主研发生产的工业薄型平行电爪,以其精密力控、精巧体积、快速响应,成为工业电动夹爪领域的“爆品”。 小体积 | 安装灵活 电动夹爪最薄处仅 18 mm,结构紧凑、支持至少五种灵活安装方式应对夹持任务需求,节约设计空间。 快速响应 夹爪开闭合时间最快可达 0.2 s / 0.2 s,可满足生产线高速稳定的夹持需求。 精确力控 夹爪采用特殊传动设计与驱动算法补偿,抓取力连续可调,并可实现 0.1 N 为单位的力重复精度。 更多特点 ...
DH-Robotics Technology Co.,Ltd

夹紧力: 3 N - 30 N
运行行程: 10 mm
... EIG是一种电动三指平行机械手,配备了两个对称平行的手指。 优势 - 尺寸紧凑 - 纤细的长方形机身,有五个安装位置,安装灵活 - 手柄控制:力和位置调节 - 快速打开/关闭时间,可调整速度 - 抓取反馈和部件检测:可在PLC/控制器上读取抓取器的状态,并通过LED灯在设备上显示出来 - 多种通信模式:该机械手支持Modbus RTU协议和IO模式控制。其他协议,如USB和ETHERNET,可以通过协议转换器实现。 - 通过嵌入式控制器进行抓取操作。 任何方向的噪音排放(声压)≤40 ...
Effecto Group S.p.A.

... 具有优异重复性的三爪平行运动机械手 FKHS系列具有紧凑的设计、三爪式机械手和出色的重复性。与双爪式机械手相比,三爪式设计允许在抓取工件上有更多的接触,以实现更精确的定心。抓取器顶部和底部的直接主体安装孔使其在安装时易于对齐。这些平行机械手简单而具有成本效益,非常适合在紧凑的空间内进行高精度工作。 主要规格 特点 - 有六种孔径尺寸:25、32、40、50、63和80毫米 - 操作压力范围。15至87 psi - 操作介质:压缩空气 - 重复性。+/- 0.1毫米 技术优势 - ...
FABCO-AIR/美国Fabco-Air

夹紧力: 36 N - 136 N
运行行程: 2 mm - 6 mm
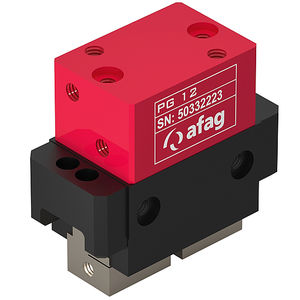
精密夹具 PG 12 •高精密钳口导向装置 •微型结构 •操作简便 精密夹具 PG 16 •高精密钳口导向装置 •微型结构 •操作简便 精密夹具 PG 20 •高精密钳口导向装置 •微型结构 •操作简便
Afag


... 产品最终包装自动化解决方案的成功与否,主要取决于各抓头系统与客户产品的匹配程度。为了确保最佳的处理效果,project A&E 提供了各种抓头 - 以下是概述。 PROGRAB Z100 是用于码垛袋的钳式抓头。抓头下降到包装货物上方并收起钳子。钳子再次张开,将货物放下。由于设计紧凑,包装袋可以理想地放在纸箱中。 ...

夹紧力: 355, 275 N
运行行程: 15, 6.3 mm
... 特点和优点 *钳口由T型槽轴承支撑,以防止钳口破裂,并提供卓越的承重性能。 *展开式卡爪和顶出式卡爪有独立的活塞,提供精确的O型圈放置时间。 *紧凑的设计,长的可调行程。真正的平行钳口运动,便于工具的使用。 产品规格 时间。 关闭。 0.2秒 [0.2秒] 打开:0.2秒 [0.2秒] 压力范围。 低/高 30-100 PSI [2-7 BAR] 温度范围。 低/高 -20°/180°F [-28°/80°C] 侧面间隙:± ...
AGI Automation Components

... 适用于小型和紧凑型应用的双指平行保护机械手。提供 8 种尺寸。 重量 - 55 克起 最高温度 - 130°C ...
Robot System Products AB

夹紧力: 8 N - 8 N
运行行程: 6 mm - 10 mm
SFG 柔性夹爪是模仿海星式设计,并模拟人手抓取的一种创新型柔性夹具。通过充气实现弯曲形变,⾃适应地包覆住目标物体,完成抓握动作;通过抽气实现反向形变,完成放置或预抓取动作;兼容性好,品类多,动作轻柔,适合大多数异形、易损物品抓取。 性能参数 Wb - 128 Wn - 30 Wm - 67 Hb - 200 Gn - 13-142 Lb - 68.2 Lt - 62.7 Ln - 44 L - 25 Gn+2Smax - 13-154 负载 ...
Soft Robot Tech Co.,Ltd

夹紧力: 107 N - 28,029 N
运行行程: 2 mm - 30 mm
... QPG是一种通用的三指中心抓取器,具有高重复性和长使用寿命的特点,适用于广泛的工业应用。 优点 坚固而轻巧的外壳,由硬涂层铝合金制成。 坚固的T型槽和硬化钢夹爪,可有效地引导爪子,精确操作,易于维护。 尺寸紧凑,对空间敏感的应用影响最小。 从一侧的两个螺丝方向安装,实现多功能和灵活的整合。 集成永久磁铁,直接监测活塞运动。 用于安装和定位磁场传感器的插槽。 通过无软管的直接连接或配件螺丝连接进行供气。 工作压力2-8巴 环境温度5-60°C 每个方向的声音排放(声压)≤70分贝(A)。 ...
Applied Robotics
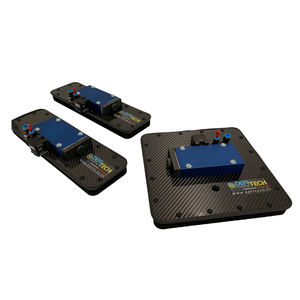
... 我们的泡沫夹持器具有许多优势,可以满足您的需求。 市场上最快的。 -超快的抓取。 -生产收益。 -减少能源消耗时间。 市场上最轻的。 -保留了机器人的能力。 -提高机器人的运动速度, -减少惯性现象, -减少能源消耗。 市场上最薄和最紧凑的。 -重心尽可能地靠近机器人。 -易于组装和整合。 市场上最安静的。 -减少机器人在车间的噪音影响。 -可调节的噪音水平。 ...
DEFITECH

... 抓取解决方案:灵活、实用、可靠 用于产品:复杂和易碎 调试:超快和简化 可完全升级。SRT卡箍是模块化的 软钳的抓取动作与人的手指相似。 它们具有灵活性,可以自适应地包裹物体,而不会造成物理损伤。 对于要求智能化、无损伤、高安全性、高适应性的客户来说,它是理想的选择。 ...

夹紧力: 9.8 N
运行行程: 4 mm
... 这款微型平行抓取器是专门为处理极小的零件而设计的,同时可以实现长行程。 主要部件采用不锈钢材质,并在5个侧面提供攻丝孔,方便安装。 优势 紧凑-轻量-快速 无声机制 快速、简单的整合 大开口角度 位置传感器 效益 无需维护 循环时间非常短 卓越的功率/体积比 低空气消耗 课程----4毫米 空气消耗量----300毫米³ 功能 - 双重功效 每分钟最大循环次数--90次 重量 - ...
PES S.A
请说明:
您的建议是我们进步的动力:
剩余字数