
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

... 运动控制器 SanMotion C SMC100 运动控制器,无缝集成运动控制、机器人控制和序列控制。 采用标准化 PLC 编程语言的结构化编程简化了程序开发,并大大促进了软件资产的共享。 此外,易于扩展的模块化硬件结构可以实现高度自由度的定制。 超紧凑型高速 EtherCAT 现场总线 * 紧凑型运动控制器 * 灵活的系统配置 2 种控制器取决于应用: SMC-A 类型:机器人控制、电子凸轮和 CNC SMC-B 类型:PTP 运动仅 以太 CAT ...

... TECOO 为客户提供 PWM 机械臂控制驱动器的 OEM 电子制造解决方案,我们对产品从无到有的整个生命周期进行跟踪,以确保产品的一致性和可追溯性。 机械臂控制是指通过控制器对机械臂的电机或液压系统进行精确控制,以实现机械臂运动的过程。具体来说,机械臂控制原理包括以下几个方面: 1.传感器信号采集; 2.动力系统控制; 3.运动规划算法 4.闭环控制; 5.前馈补偿 ...
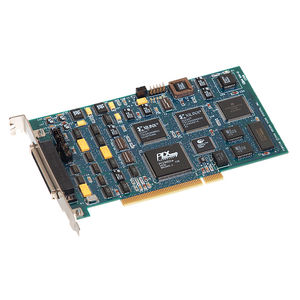
... PCIx 是一款符合 PCI Rev.2.2 规范的 PCI 4 轴运动控制器。 PCIx 是一款适用于伺服或步进电机的四轴控制器。 它支持 12 个光隔离的通用位,以获得最佳的抗噪声性。 家庭和过程输入是选择隔离的。 PCIx 的架构包括一个双端口 RAM,用于需要快速收集大量数据的特殊功能,例如配置文件采集。 伺服输出为 +/-10V 或 0-10V 信号,由 16 位 DAC 驱动。 伺服控制环路是具有前馈系数的 PID 滤波器。 步进脉冲是 TTL 水平的 ...

... MAXnet是一个1-10轴的运动控制器,适用于自动化设备、机器人和要求准确、精确和灵活的应用。以太网接口利用标准的TCP/IP协议进行兼容,几乎可以从任何地方进行控制和/或监控。包括一个高速RS232串行接口,波特率为9600至115.2k。除了极限、原点和运动控制信号外,MAXnet还包括8个双向I/O,5个输出,2个模拟输入和1个模拟输出(5轴)。 OMS运动控制器在可靠性和性能方面拥有40多年的声誉,MAXnet也不例外。板载Flash存储器可以存储独立应用的宏程序。MAXnet固件可以通过以太网或串行接口进行升级,允许控制器嵌入系统中,而不需要拆卸。IODnet互连模块堆叠在MAXnet上,形成一个紧凑的系统,具有方便的螺丝端子连接。MAXnet的一个主要特点是子板的扩展接口,提供了无可比拟的灵活性,有助于最大限度地减少对第三方控制器的需求。 基本的MAXnet是一个5轴控制器,通过一个子板可以实现10轴。在MAXnet上生产定制子板的能力提供了无穷无尽的机会,将独特的功能和运动控制结合起来,实现最佳的系统性能。 ...

... MaxNet 10 轴型号利用新的 DBNet 子板,将能力扩展到 10 轴协调运动。 该模型与原来的 MAXNet(4” x 6.5”)相同的封装尺寸,现在的高度约为 1.6 “。 除了扩展的控制轴,该模型还包括额外的 I/O。 MaxNet 型号 6000-A000 现在支持 16 个通用 TTL I/O,此外还支持 4 通道的 16 位分辨率的通用模拟输入和两个额外的通用模拟输出。 DBNet 子板还为扩展功能提供额外的定制机会。 ...

... MP3300iec 是 MPiec 系列的最新成员。它提供 - IEC61131-3 和 PLCopen 编程标准 - MECHATROLINK-III 运动网络 - 1、3 或 8 个选配模块 通信协议 - 开放式标准 EtherNet/IP、Modbus/TCP 等,可连接市场上的许多外围设备。 标准编程语言 - IEC61131-3 意味着程序的开发和执行都具有可预测性。 可编程放大器输出 - 控制器可操作本地 SERVOPACK ...
Yaskawa America, Inc. - Drives & Motion Division


... 富优直线运动 6 轴智能控制器 支持连接 65,535 台设备 支持语言:C/C++、C#、Python 等 支持系统支持系统:Windows、linux 支持协议:Modbus/CAN/ethercat 提供定制编程服务 支持 RS232、RS485、CAN、EtherCAT、RJ45 网络端口等硬件通信接口 支持 Modbus、canopen、ethercat,支持 65,535 个设备连接到工业总线协议 支持单轴线性插值、圆弧插补、回零和其他运动 PWM ...

... MC 运动控制器专为数控机床、工业机器人、半导体和工程机械等复杂的单设备运动控制应用而设计。MC 提供高速、高精度的多轴控制,在一个系统中支持多达 64 个轴。它还拥有丰富的用户友好型算法库,可实现多种性能。 功能特点 兼容性强 支持 EtherCAT MC1002E 和 RTEX MC1002R 与多家制造商的伺服驱动器兼容 与 LE 无缝集成 多种控制模式 开环/闭环脉冲伺服控制 开环/闭环模拟伺服控制 开环/闭环总线伺服控制 高性能 250 ...

... 该运动控制器可控制 7 轴关节型机器人。它可以控制各种机器人的运动,为系统内部的机器人运动规划做出贡献。 丰富的机器人控制功能 该运动控制器可控制业界领先的(1) 15 种机器人配置,包括复杂的 7 轴关节型机器人。可轻松实现轨迹控制和插补操作等功能,为内部机器人运动规划做出贡献。 帮助系统实现物联网 该运动控制器可连接到 EtherCAT、Modbus TCP 和 OPC UA 等各种开放式网络。通过在网络中的设备之间实时共享信息,它可为工厂的自动化和物联网就绪做出贡献。 缩短开发时间 该运动控制器可将机器人控制和机器控制开发环境整合为一体。这使得在单一开发环境中模拟整个系统的运动成为可能,从而大大缩短了机器的维护和开发时间。 节省设备空间 与现有型号相比,产品体积缩小了约 ...

... 在 X86 架构下,借助实时通信技术,对并联机器人编译环境、高阶轨迹规划算法、双动态跟踪算法等核心技术进行代码封装,满足并联机器人在高速、高精度要求下的动态实时抓取操作。 ...
请说明:
您的建议是我们进步的动力:
剩余字数