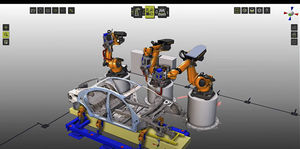
... 离线编程、模拟、调试和其他下游流程需要一个真实的模拟模型,以所有必要的细节来代表机器人单元。FASTSUITE支持用户通过定义其运动学甚至是仿真行为,从3D CAD数据中轻松创建和管理布局。如果缺少任何组件,它可以被快速添加到仿真布局中。 高效和直观的工具,从三维CAD建立仿真布局 完美的布局是成功的OLP项目的先决条件 FASTSUITE提供直观的工具和功能,从库中的组件建立布局,或将静态的三维CAD数据转换为仿真布局,不管是需要单机器人的OLP工作单元还是多机器人的安装。 除了布局构建功能外,"概念规划师 ...

... 在与数控机床的直接比较中,机器人在购买和维护方面是灵活的,而且价格低廉。 然而,只有通过将该模块与其他编程和制造过程的整合,才能实现该技术的广泛使用和充分受益。通过NX CAM机器人技术,你可以得到一个完整的机器人编程模块,它与CAD/CAM技术中的其他编程模块无缝集成。 减少了编程时间 因模拟而产生的高工艺可靠性 修改或类似零件的周期短 最新的后置配置器技术的后置处理程序 不因接口而丢失信息 近年来,用于机械制造的工业机器人的数量不成比例地增长。它们具有灵活性和经济性,甚至提供了加工大型部件的机会。出于这个原因,机器人系统越来越多地被用于一些制造工艺和工艺阶段的优化和自动化。这包括雕刻、抛光和研磨等过程,也包括搬运和在某些领域的铣削。然而,这些天来,编程经常是手动进行的,这往往是造成高比例成本的原因。有了NX ...

ROBONET igm软件,用于从任意PC到机器人控制的网络操作和远程访问 将数据传输到一台或多台机器 远程监控焊接和运行数据 可以在笔记本电脑或PC上查看示教器显示屏
igm Robotersysteme AG
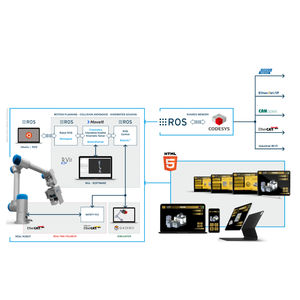
... RoboVuTM 强大的虚拟连接连接器 RoboVu ™虚拟连接器用于从ROS(机器人操作系统)应用程序连接到Ethercat RoboVu ™连接软件用于从ROS(机器人操作系统)驱动执行器。 由Automationware RoboVu ™设计并获得专利的Linux应用程序,简化了虚拟ROS应用程序与EtherCat总线的连接。机器人管理员在虚拟区域计划运动,由于RoboVu ™应用程序可以将它们传输到现场总线,实时移动连接的执行器,确保控制附属功能,如重力补偿或关节因操作原因发出的警报。RoboVu ...
automationware


... SCOPE是我们的安全解决方案,用于从您的机器人队伍中持续挖掘EDGE数据,提供开放和透明的数据路由(到您的MES或ERP系统),满足您的任何需求。它能即时分析机器人的健康状况和压力,通知即将进行的维护,从而为您的生产资产提供一个概览,以更好地控制您的整体设备效率(OEE)。 SCOPE为从预防到预测性维护和更智能的行业铺平了道路。 智能解决方案: 提供对分析和机器人数据的访问,在一个仪表板上提供监督机器人车队运行状态的可能性,并提供机器人系统状态的深度分析。 最多可连接50个机器人: SCOPE是一个新的硬件平台,能够将您的车队完全连接到不同的系统层。 优化您的设备,以减少压力并提高您的OEE: SCOPE允许优化您的机器人性能和轨迹。机器人的压力被降低,性能被调整到您的生产能力,以延长使用寿命。 通过监督您的机器人队伍,防止生产停工: 您的全球机群概览可轻松安排所需的维护行动。 启用新的功能,同时受益于更新: 该平台是根据您的需求定制新功能的基石。 ...
... TSAssist 是 SCARA 和 6 轴机器人的编程软件,可为自动化的各个阶段提供强大的帮助。从规划、安装到改进。 该编程工具还可用于上传和下载程序和参数文件、生成三维模拟、执行检查并包含最新的图形用户界面。 TSAssist 也是现有 TSPC 编程软件的升级版,具有更高的灵活性和用户友好性。此外,程序员甚至可以在对正在设计的工作单元进行三维模拟时导入自己的 CAD 文件。 ...
... TCWorx 是为监控和编程 TCmini 而开发的机器人编程软件。TCmini 内置可编程逻辑控制器 (PLC),与所有 SCARA 和 6 轴工业机器人控制平台配套使用。 ...
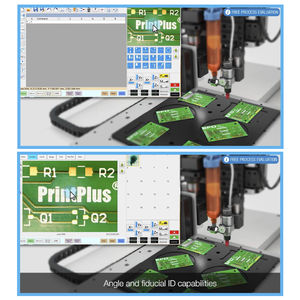
... 诺信 EFD 推出直观的 DispenseMotion 软件和完全集成的智能视觉摄像系统,使自动点胶系统的设置和编程变得轻而易举。凭借直观的点击功能,即使是最复杂的点胶模式也能轻松编程。 对于工件对齐和位置变化会影响点胶位置的关键应用,角度和靶标识别功能可为点胶过程增加额外的精确度。只需使用软件和视觉系统指定角度和靶标,将轮廓保存在库中,剩下的就交给系统在点胶周期中处理。 现在,创建一个具有优化相机对准和喷嘴偏移设置的完整点胶周期,就像点击、确认一样简单。复杂的点胶模式可通过实时查看功能进行简化,以检查点胶点,确保每次点胶都能精确定位。 EFD ...

... 无论您是机器人程序员还是焊接工,ABB 都能为您提供全套易于使用的软件工具,帮助您提高生产率、降低风险并最大限度地提高机器人系统的投资回报,从而改进弧焊工艺。 生产经理 生产管理器可监控生产周期,与应用无关,也可用于非焊接应用。生产经理负责 描述要生产的零件 在一定时间间隔内运行设置和服务程序 将我们的物理单元布局映射到逻辑工作区 在标准化的事件链中组织程序流程,保持动态执行 在多重移动的情况下同步某些工作 通过 ...

... 与传统的五轴激光切割机相比,使用机器人进行激光切割具有显著的成本优势,而且占用的地面空间更小,同时还能优化生产布局,从而节省生产空间和成本。 在许多情况下,机器人激光切割可以省去一个或多个成本高昂的生产操作,从而提高生产流程的效率。ABB 开发了两种先进的软件工具来支持切割应用。 RobotStudio 切割 PowerPac 这是一款复杂的离线编程软件包,可插入 RobotStudio,允许用户在三维模拟环境中生成和修改编程路径,而不是在工厂车间。 RobotWare ...

... myREX24 V2 门户是一个集成系统,用于访问机器或系统的组件,进行远程维护和远程诊断。通过网络浏览器--直接使用智能手机或平板电脑--对系统数据进行控制。您可以通过 myREX24 V2 门户评估和监控作为外部信号或作为控制系统中的数值的所有数据和状态。直接在 myREX24 V2 门户中记录运行数据,并创建自己的报告。 myREX24 V2 公共服务器 免费账户 通过免费账户,您可以访问我们的 myREX24 V2 门户网站,并使用全部创新功能,不限设备和用户数量。 无论您主要是想进行远程维护、接收机器发出的警报还是查看和记录机器数据,myREX24 ...

优异的机器人性能:通过我们的 KUKA.CNC 系统软件,CNC 和机器人可以直接相互连接,并且操作方式与传统 CNC 控制系统的一样。 • 基于 CNC 的机器人编程 • 在控制系统上修正刀具半径 • 改善机器人轨迹性能 • 通过 CAD/CAM 系统进行离线编程的方式 立即可以使用 KUKA.CNC 率先实现了完全安装在 KR C4 中的 NC 控制核心,因此可以使 NC 程序直接在 KUKA KR C4 控制系统上运行。通过 ...
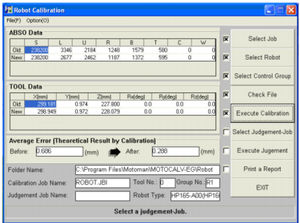
... 绝对定位精度对于高精度应用中的路径精度非常重要,对于离线编程 (OLP) 也至关重要。与任何机械系统一样,机器人在制造过程中也存在公差。MotoCalV EG 是一款软件工具,提供五种不同的校准实用程序,可提高安川 Motoman 机器人的绝对定位精度、工具中心点 (TCP) 和工具姿态。 MotoCalV EG 的主要功能包括 机器人校准 工具校准 工具姿态校准 工作场所校准 布局校正 ...

软件的各个功能 有效荷载自动识别:自动识别有效荷载,优化机器人动作 碰撞探测:可能发生碰撞时机器人紧急停止,保护机械和设备。 协调及同步动作:协调并同时管理几台机器人和辅助轴(线性跟踪、伺服枪、变位机以及其它应用设备) 传送带和传感器跟踪:在线性和环形传送装置上跟踪工件动作。通过使用各种类型的外部传感器精确跟进工件运动路径。 关节软伺服技术:根据具体应用,某个机器人关节屈服于外力的能力。 干扰区域:为了限制机器人工作空间而划出来的各种形状的区域,可动态定义。 机器人绝对精度:将实际运动学与离线编程的理论模型进行适配的算法。 Robosim ...
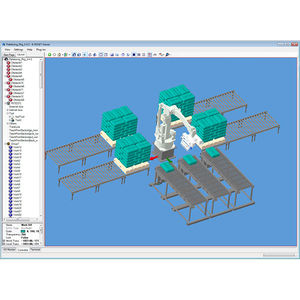
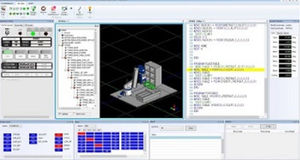
K-SPARC建立在K-ROSET平台之上,是川崎的码垛软件。这个工具通过简单的步骤,引导用户设定一个单一的机器人码垛工作单元。 从R,Z,M系列型号中选择机器人 从12个可用的布局中选择 定义托盘和工件参数 选择样式和位置顺序 加载数据到虚拟机器人,改进拾放点 通过界面面板控制码垛作业 从开始到结束,用户可以实现随时可以加载的AS程序,该程序可以直接在机器人控制柜中使用。K-SPARC支持包和箱子的码垛,有超过100种内置样式可供选择。除了编写AS机器人代码,K-SPARC还可以输出充分开发的可直接实施到生产中的用户界面。

... 对安装机器人的初步研究非常好 可作为操作指导工具使用 桌面上的FD常规(选项) 离线编程 工作包络和布局考虑 周期时间模拟 PLC编程编辑 FD on Desk Pro (选项) 从CAD创建程序 支持多个控制单元 * MZ系列将FD on Desk Light(仅CFD控制器)作为标准设备。(功能与FD on Desk Regular相同) ...

... 莱昂纳多系统诞生于 2015 年,制作或多或少复杂的机器人项目在时间和资源方面是一项极其昂贵的工作。 使用 Leonardo System,我们将一个敏感的编程臂和手柄与工业 PTP 机器人结合在一起,通过开发的软件,我们允许操作员手动制作机器人将忠实地遵循的路径。 用快速、本能、可编辑的任何资源的手势取代专家程序员的长期工作。 ...
请说明:
您的建议是我们进步的动力:
剩余字数