
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
对自身应用和工艺的了解是工程师的核心竞争力之一。而在这些领域的差异化优势是市场成功的决定性因素。 由于其开放的软件架构,FlexCore 控制平台为个性化解决方案提供灵活性。自有的软件模块可以深度集成到控制核心层面,并与成熟的 KEBA 系统相结合。 优势一览: 开放式控制平台,提供个性化解决方案 面向未来的标准 Linux,具有实时扩展功能。 满足特定行业需求的高端技术 工业机器人、塑料机械和可视化解决方案的交钥匙工程 ...
... 机器人软件的未来。 功能强大、易于使用的新一代自动化工具。 机器人技术的巨大飞跃 机器人技术的巨大飞跃。 在 Standard Bots,我们精心设计硬件和软件。我们的解决方案功能强大、简单易用,能够以您想象不到的方式优化您的操作。 优化您的运营只需几分钟,而不是几个月。 适用于您的所有运营方式。 我们知道,每个企业都有独特的需求。这就是为什么我们在设计和制造产品时,会不折不扣地提供灵活性。 标准 Bots 平板电脑,示教器 内置机群管理。 无论您拥有一个机器人还是一个机群,我们都能通过一个便捷的应用程序,轻松实现机器人的管理、状态检查和切换。 像读故事一样读取例程 与大多数需要编码的复杂例程编辑器不同,我们的例程简单易懂,同样易于编程。 并排例程编辑器 并排查看和编辑 效率至关重要。通过并排布局,您可以同时查看和编辑完整的例程和单个步骤。 功能强大且直观 功能强大且直观 无需聘请昂贵的工程师来运行机器人。使用我们最先进的软件,RO1 ...

... GPS 航点导航包是一个硬件和软件套件,允许用户从工作站选择 GPS 航点或一系列航点,并引导机器人在各点之间自动行驶,并支持障碍物检测。 该套件专为学术和企业研究人员而设计,包括: • GPS 传感器 • 航点设置和指令软件 • 操作员控制单元 • 支持激光雷达和障碍物检测 功能 视图从上面 集成机器人的 GPS 数据和直观的图形界面允许用户轻松查看机器人的周围环境,创建和选择航点,并跟踪机器人沿其当前路线的进度。 精密 GPS 高精度 GPS 技术使机器人能够在无需人工干预的情况下精确定位、找到方向点并在它们之间行驶。 ...

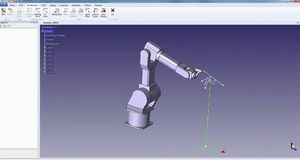
... Marvin 是我们用于快速机器人编程的新软件。它支持不同的轨迹输入设备(如 HTC VIVE 和 Valve Index International 或数字化仪,如 Kreon Technologies 和 Revware Inc.),并为各种工业机器人(安川电机、库卡、发那科、爱普生、史陶比尔、那智、现代......以及更多其他机器人)生成代码。用户还可以直接与 3D CAD 模型或 3D 传感器获取的点云交互输入点。 Marvin 可以离线使用机器人工作单元的数字孪生体,在构建系统前验证和优化流程。例如,可以轻松教授几条路径,并在模拟中尝试使用不同的工具配置。 Marvin ...
应用程序图形管理器 (AGM) 可提供许多功能层,包括用户界面框架、几何体撤消/重做特性、渲染引擎以及这之间的一切功能,并能够与所有其他 Spatial SDK 紧密集成。 成熟的框架 AGM 已被不同行业的 40 多个组织采用,如 Computer Aided Engineering (CAE)、Robotics、Metrology、Computer Aided Design (CAD) 等。 可扩展性和紧密集成 AGM 开发人员可直接访问 ...

使用CGI Studio做HMI设计 Candera CGI Studio是可扩展且独立于硬件的HMI设计工具。 它可以开发针对汽车,工业和家电领域的各种创新和定制化的嵌入式GUI解决方案。我们的HMI设计工具的特殊USP在于其用户友好的界面以及2D / 3D显示和动画的高性能显示。 CGI Studio包括即用型HMI控件,智能Photoshop导入程序,自动工作流程和集成状态机,使您只需单击几下鼠标即可显示任意HMI的逻辑和结构。 CGI Studio的开放式体系结构还可将其与您公司的工作流程进行深度集成和自动化匹配。 图形用户界面开发流程 创建完美的人机界面不是一个步骤,而是一个过程。我们可在这一开发过程中的每个阶段为您提供帮助。CGI ...

... 用Cognite Data Fusion®激活机器人技术。实现重复性工作的自动化,进行远程检查、维护和修理任务,并通过消除前往危险地点的需要来保证工人的安全。 认识你的新同事 通过在一个地方访问传感器数据、资产层次和空间信息,机器人系统--从无人机到有轮子和四条腿的机器人--可以连接到数字双胞胎并通过其API自动收集数据。 自主检查 不再有夜班。让机器人处理巡检和其他重复性任务,并腾出时间用于创造价值的活动。机器人还可以对你的资产和装置进行日常扫描,更新360度的图像,并保持3D模型的更新和远程操作的可信度。 远程呈现 让您的专家远离危险。对于偏远、高风险或受限制的地点,机器人可以成为人类操作员的眼睛和耳朵,以毫秒级的延迟传输高质量的视频。 资产跟踪 知道所有东西的去向。机器人可以跟踪可移动的资产,如集装箱、桶、材料、卡车、升降机等,并使现场的每个实物都可以被搜索到。 机器人数据管理 所有的数据都在一个地方。通过Cognite ...

... 3D_Evolution是一个专门用于转换和简化3D CAD数据的解决方案。 特点和工具 ■︎ CAO转换 CATIA V5, CATIA V6, CREO, NX, Solidworks, Inventor, JT, STEP, PDF-3D, XT, ACIS, DWG, DGN... ▪︎ JT/PLMXML/STEP转换器AP242-戴姆勒认证 ▪︎ FBX转换器 ▪︎ 与PMI构建历史、元数据的转换 ▪︎ 简化和简化率>97%。 ▪︎ FEM工具 ▪︎ ...
CORETECHNOLOGIE
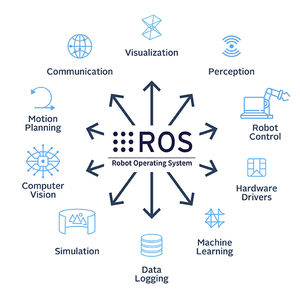
... 用ROS为机器人编程 ROS(机器人操作系统)是一个开源的开发环境,由一套软件库、工具和算法组成,用于机器人和先进自动化系统的开发和编程。它是一个不断发展的模块化系统,由于其开发者社区的贡献而不断增长。 ROS允许你为各种应用进行复杂的运动学编程,并使机器人在工业总线(如EtherCAT或Profinet)上同步,使它们与网络上所有其他设备同步。持续更新的特定软件包,如SROS,可以保护系统免受网络攻击。 ROS是所有AutomationWare机器人解决方案和驱动器的基本组成部分。我们提供的所有协作机器人都安装了基本的ROS软件包,其中包括所有驱动程序和cobot的3D模型,还包括用于定位和使用地图的工具以及用于规划运动的模拟器。 您想开始规划为您的应用量身定做的解决方案,或设计和测试个别软件模块的脱机?我们提供带有3D机器人模型的模拟软件、测试环境和预配置的、易于调整的导航包。您可以模拟所有的传感器数据,创建地图并使cobot在虚拟环境中移动。有机会看到我们的协作机器人的驾驶行为,尝试他们对不同条件和障碍物的反应,并测试你的变化。 ...

史陶比尔机器人软件包是一个广泛的PC软件环境,它可简化机器人系统的管理。从概念和仿真到设置再到生产,它可以轻松永久地改进您的机器人应用程序。它清晰地指导您模拟、开发和调试机器人程序,直到最终验证和传输任何系统数据的过程。由于其应用程序的多功能性,它是理想的智能生产工具,支持在Windows操作系统上多屏协作。 • 快速验证机器人的可行性 凭借史陶比尔机器人软件包,即使没有机器人编程经验,也可以在3D环境中轻松地评估自动化概念。 • 对单元概念提供舒适 ...
... 包装机管理和控制软件 CAESAR 软件由 Imanpack 开发,可与 Imanpack 包装机集成,允许客户使用 PC 或移动设备(平板电脑或智能手机)管理整个生产线。 CAESAR 软件提高了机器效率,并允许从办公室或远程管理其性能,优化成本和时间。 为什么安装凯撒 凯撒能够提高机器的效率,并允许管理他们的表现从办公室或远程,降低成本和时间。 使用凯撒 远程线路管理的好处. 与您的管理软件兼容。 生产数据收集和创建定期报告的可能性。 ...

... myREX24 V2 门户是一个集成系统,用于访问机器或系统的组件,进行远程维护和远程诊断。通过网络浏览器--直接使用智能手机或平板电脑--对系统数据进行控制。您可以通过 myREX24 V2 门户评估和监控作为外部信号或作为控制系统中的数值的所有数据和状态。直接在 myREX24 V2 门户中记录运行数据,并创建自己的报告。 myREX24 V2 公共服务器 免费账户 通过免费账户,您可以访问我们的 myREX24 V2 门户网站,并使用全部创新功能,不限设备和用户数量。 无论您主要是想进行远程维护、接收机器发出的警报还是查看和记录机器数据,myREX24 ...

... 特点:预处理可以通过离线编程软件生成,然后更改坐标,优化输出由机器人语言编译的加工文件,可以生成复杂的路径。 应用:主要用于三维实体的切割、粘合、涂漆、铣削、雕刻和焊接。 ...
请说明:
您的建议是我们进步的动力:
剩余字数