科聪机器人应用软件,是浙江科聪完全自主设计研发的机器人应用部署软件。软件功能包含机器人模型管理、地图管理、调度配置管理,它是机器人实施工程师的得力武器,通过便捷的人机交互设计,可以让应用实施工程师可以在不同的应用场景,快速高效的构建应用环境地图和完成应用功能部署。 产品具有灵活的路径构建能力,可快速的构建路径。产品将复杂的机器人部署过程进行智能封装,可让实施工程师简单便捷的使用,达到快速高效部署的目标。
现场地图扫描制作
在对新的场景进行实施时,首次地图制作,只需人为控制机器人运动系统将自动记录现场地图,同一场景不同机器人可复用地图。
机器人标定
机器人在生产、安装过程中会存在机械误差、软件参数等的差异。需使用自动标定工具进行标定,以修正差异,提高一致性。
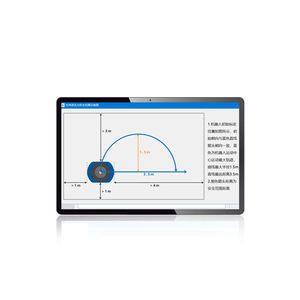
任务点、路径建立
在已有的地图上,可根据需求设立任务点,连接点,即可完成路径设置。支持弧线、直线、折线等各种形式路径设立,满足不同需求。
任务步骤配置
完成前序步骤后,可在任务配置工具中,配置任务逻辑,单台机器人即可按照步骤执行简单任务