我们开发了一种新颖的密闭空间机器人定位方法。该技术提供了机器人在资产中的全三维空间感知和三维交互式机器人控制。检测数据会自动标记在资产中的精确位置,并维护一个包含所有检测数据的数字孪生系统。检测报告会自动生成,数据可上传至资产性能管理系统。
本地化
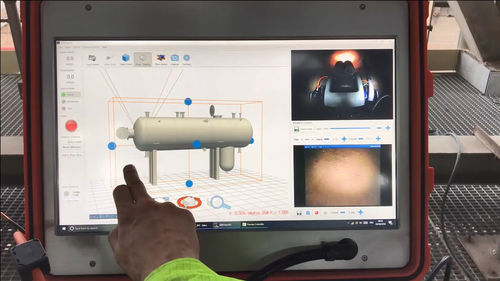
系统能够自我定位,并自动将捕捉到的图像与正确的资产坐标联系起来。在正常尺寸的压力容器和储罐中,精度和可重复性为 ±25mm (±1″)。
导航
该技术可提供机器人在资产中的全三维空间感知和三维交互式机器人控制。对于操作员来说,这意味着精确且易于使用的导航功能。
数字化
使用配备 3D LOC 的机器人采集的检测数据(如图像、UT 厚度测量值、涡流数据等)会标记资产中的位置,并与 3D Digital Twin 集成。
---