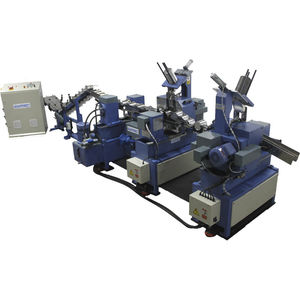
罐体是以垂直位置进入机器的。
该生产线由以下工位组成:
第一站:进料输送机和同步到罐体传送臂
进料输送机和同步到传送臂将在各站之间移动罐体,进行以下操作。同步是由电子凸轮驱动的气动手指来完成的。转运臂的来回和开合运动由凸轮系统完成,凸轮系统由伺服电机驱动。
第二站:焊接线分度单元
机身在旋转台上转动,以检测焊接线的位置。焊接线按照屏幕上的设置进行定位。焊线的检测是通过对比度传感器或超声波传感器完成的。
第三站:身体塑形单元(扩大)。
圆柱形的身体被提升到悬挂的扩张臂上,这将从四个角进行扩张。扩张和皮带系统的提升是由伺服电机驱动和控制的。扩张范围和提升高度可以通过触摸显示屏自动调整。
第四站:底部翻边装置
机械动力翻边系统从角落里挤压机身。膨胀的车身通过伺服凸轮机构被提升到倒挂的翻边工具上。
翻边和缝合头在同一个柱子和头架上,为了调整设定的高度,它们一起上下移动。
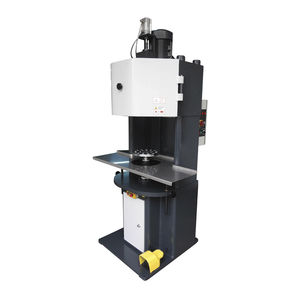
第五站:底部缝合单元,带有自动末端送料器
端头在水平位置的垂直传送带上堆积,并自动送入
---