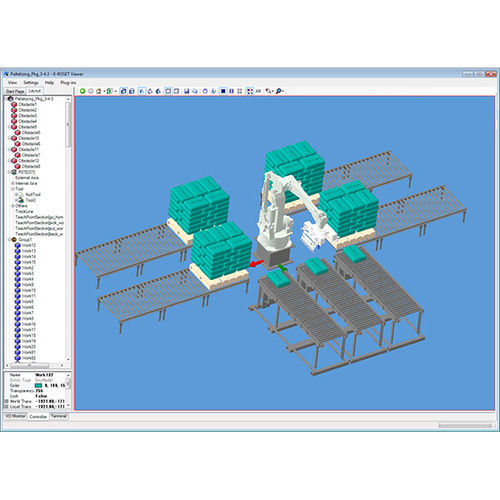
K-SPARC建立在K-ROSET平台之上,是川崎的码垛软件。这个工具通过简单的步骤,引导用户设定一个单一的机器人码垛工作单元。
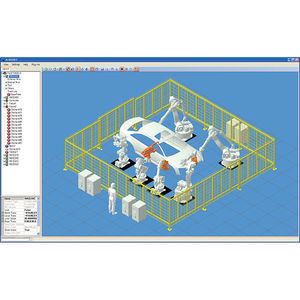
从R,Z,M系列型号中选择机器人
从12个可用的布局中选择
定义托盘和工件参数
选择样式和位置顺序
加载数据到虚拟机器人,改进拾放点
通过界面面板控制码垛作业
从开始到结束,用户可以实现随时可以加载的AS程序,该程序可以直接在机器人控制柜中使用。K-SPARC支持包和箱子的码垛,有超过100种内置样式可供选择。除了编写AS机器人代码,K-SPARC还可以输出充分开发的可直接实施到生产中的用户界面。