- 机器人、自动化、工业信息技术
- 工业机器人
- 并联机器人
- Beijing Cyberrobot Technology Co., Ltd.
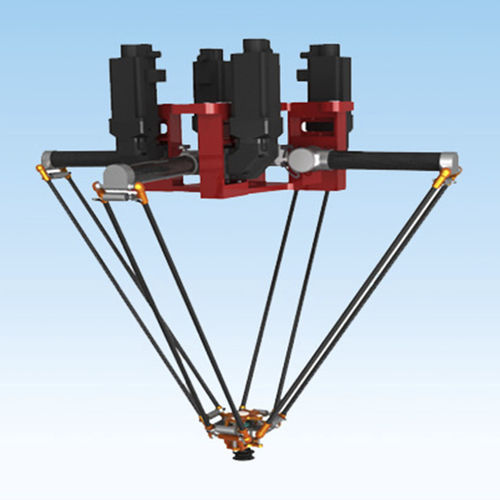
并联机器人 CBT-C4A14轴分拣食品工业


添加到我的收藏夹
添加到产品对比表
fo_shop_gate_exact_title
产品规格型号
- 类型
- 平行
- 轴数量
- 4轴
- 功能
- 分拣
- 应用领域
- 食品工业
- 最大载荷
最多: 3 kg
(6.614 lb)1 kg
(2.205 lb)- 重复精度
0.1 mm
(0.0039 in)
产品介绍
说明:
CBT-C4A1 型分选机器人控制系统是基于 IP 的软件功能开放式控制系统,其特点是利用软件实现运动控制器的硬件功能。 基于 IP 的实时核心技术和编程环境结合各种 I /O 设备和机器视觉系统,通过现场总线技术整合各种 I/O、软 PLC、NC 和机器视觉系统,形成一套完整的实时控制解决方案。
• CBT-C4A1 排序机器人控制软件提供更深层次的定制开放性,支持底层运动控制策略(算法),此外还支持上层软件程序的定制(程序编辑、人机界面等)。 软件实施的灵活性和硬件平台的独立性将有助于系统实现更大的开放性和更快的系统性能增长,同时方便用户进行第二次开发和升级,这符合信息技术的发展趋势。
技术特点:
• 链支结构采用预固 Hooke Hinge,拥有独立的知识产权,可有效扩大机器人的工作空间,确保机器人的运动性能。
• 通过增加伸缩轴和旋转轴的安装,机器人可以实现终端效应器的旋转、分类物体在空间中的移动和放置,从而扩大机器人的应用范围。
---
PDF产品目录

Beijing Cyberrobot Technology Co., Ltd. 的其他产品
Intelligent Automation Products




* 显示价格为参考价,此价格不含税、不含运费、不含关税,也不包含因安装或投入使用所产生的其他额外费用。参考价格可能因国家、原材料价格和汇率的不同而产生变化。