Autel Mapper 是一款业界领先的PC端模型重建软件,可以将无人机拍摄的照片重建为二三维模型。建模过程采用传统算法和深度学习相结合的方式,为测绘、安防、巡检、交通、建筑等行业用户提供高效率、高精度、高质量的重建成果。
三维重建
先进的计算加速算法,使得三维成果的重建效率得到大幅度提升。重建质量可选高、中、低三档,支持细小物体重建,满足多行业需求。
任务量
500张/1GB空闲内存(单机)
时效性
1万张/18小时*(单机)
精度级
厘米级(1:500测绘精度)
成果格式
B3DM、OSGB、OBJ、PLY
*由EVO II Pro RTK V3采集的影像导入进高性能工作站后选择高分辨率处理得到的结果。
二维重建
利用深度学习技术,AI算法可在不同场景下自主适配,免像控技术可满足测绘领域1:500的精度要求,测区信息精准呈现。
任务量
500张/1GB空闲内存(单机)
时效性
8000张/6小时*(单机)
精度级
厘米级(1:500测绘精度)
成果格式
GeoTIFF
*由EVO II Pro RTK V3采集的影像导入进高性能工作站后选择高分辨率处理得到的结果。
所见,即所得
快速拼图
在飞行过程中,遥控器将拍摄的可见光、热成像或夜视影像推送至Autel Mapper进行2.5D拼图,通过先进的图像处理算法快速生成高精度影像,为现场作业人员及时调整工作流程提供判断依据。
多元快拼方式
边飞边建、快速后处理拼图
多种输出结果
DOM、DSM、2.5D可视化
分享更便捷
快拼成果支持在App、道通天穹和第三方平台上查看
多元快拼方式
边飞边建、快速后处理拼图
多种输出结果
DOM、DSM、2.5D可视化
分享更便捷
快拼成果支持在App、道通天穹和第三方平台上查看
多元快拼方式
边飞边建、快速后处理拼图
多种输出结果
DOM、DSM、2.5D可视化
分享更便捷
快拼成果支持在App、道通天穹和第三方平台上查看
空中三角测量
通过先进的匹配算法将卷帘相机或全局相机拍摄的数据智能分块进行空三计算,大幅提高空三通过率,并有效解决不同高度、不同分辨率大数据量照片的处理问题。
98%空三通过率输出格式:XML
加密点云
支持输出高、中、低质量加密点云的重建成果,有效避免模型重建时出现空洞、变形等情况,为三维模型的重建奠定基础,提高模型精度。
*成果格式可选择PNTS、LAS、XYZ
重建优化
步骤二:可指定生成某块数据,并在处理状态界面同步显示处理块的数据信息,方便用户针对性处理数据,便于满足不同项目的需求。
兴趣区域重建
模型重建处理
重建管理
自动识别相机参数,
相机智能分类管理(支持主流无人机厂商的相机);
相机可设置毫米和像素单位,灵活调整相机参数,方便模型处理。
支持POS数据导入与导出、坐标系编辑、数据精度选择,以及飞机姿态角度数据调整,满足多场景重建需求。
支持像控点标记以提升重建精度。当像控点标记两个及以上的点后,可通过自动标记功能标记剩余的点,以减少用户在同一个像控点重复操作。
支持像控点导入及导出,多人协同标记节省处理时间。
相机参数
POS数据管理
像控点管理
成果管理
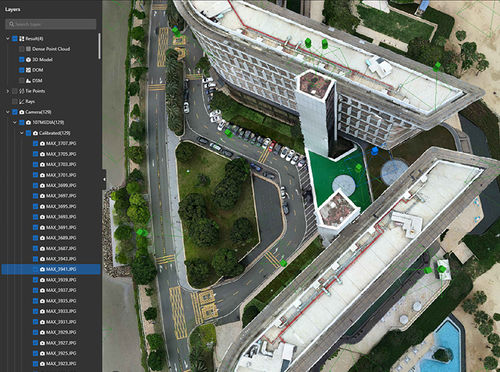
Autel Mapper 支持DOM、DSM以及点云模型可视化,同时也能保证粗糙层级的清晰度,让浏览更顺滑。
成果展示
人性化体验
直观的层级联动设计:图层树、地图视图、影像管理三级联动。操作逻辑化繁为简,图像数据导入和绘制工作从未如此轻松高效。