- 机器人、自动化、工业信息技术
- 工业机器人
- 并联机器人
- ACROME
关节型机器人 ACROBOT协同操作平行6轴

添加到我的收藏夹
添加到产品对比表
产品规格型号
- 类型
- 关节型, 协同操作, 平行
- 轴数量
- 6轴
- 功能
- 测试
- 应用领域
- 应用
- 其他特性
- 定制
- 最大载荷
2 kg
(4.409 lb)- 作用范围
960 mm
(37.8 in)- 重复精度
0.1 mm
(0.0039 in)
产品介绍
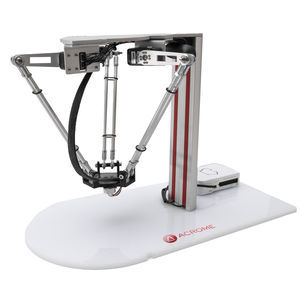
ACROME Acrobot是一个具有定制关节选项的机器人手臂系统,可作为协作机器人技术、智能控制系统和工业4.0的测试平台。
综述
ACROBOT 6-DOF机器人手臂,拥有高科技的关节驱动器,是一个实践性的实验,缩小了真实工业系统和DIY方法之间的差距。用户可以了解复杂的逆运动学算法,并为工业平行运动学机器人快速建立新的运动控制架构原型。ACROBOT使学生和研究人员能够设计复杂的应用,并使他们能够进入工业4.0的世界。完全开源的软件使得研究人员可以修改和测试他们开发的算法。
软件选项
LabVIEW,实时(可选),FPGA(可选)。
MatLab/Simulink
平台选择
本地PC(Windows)
数字-双胞胎
特点
组装的6 DOF串行运动学手臂机器人
铝合金铸造的关节结构
每个关节在齿轮减速后都有一个高分辨率的绝对编码器重复精度为+/- 0.1毫米
通过高精度的智能伺服驱动器来驱动机器人(3.5 - 4.5 arcmin的背隙)。
在最大范围内有2公斤的有效载荷。960毫米的工作空间
可以控制位置、速度和扭矩(电流感应)。
与MATLAB®/Simulink®和LabVIEW™完全兼容
在MATLAB®/Simulink®和LabVIEW™中为串行运动学手臂机器人建立Denevit-Hartenberg公约模型
使用户能够创建自己的实时算法
开源软件架构,具有丰富的课件,适用于机器人学和控制系统的本科和研究生课程
---
PDF产品目录
该产品还没有PDF产品手册
查看ACROME的所有产品目录