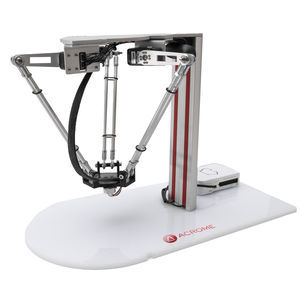
ACROME斯图尔特平台是一个具有定制尺寸选项的并行机器人系统,可用于学术界的先进机器人概念和工业界的各种应用。
综述
由于线性执行器、陀螺仪和三轴加速度计的高灵敏度,Stewart平台可以提供六轴的真实模拟。由于组件的可访问性和用户友好性,它适合模拟真实的系统,如飞行模拟器、机床技术、起重机技术、机械公牛、精密平台定位,如望远镜、天线和骨科手术。Stewart平台的每个单元都可以通过可修改的开源软件独立控制,用户可以了解不同的控制器类型对系统的影响。通过大量的课件,用户有机会学习机器人技术的基本方面,并轻松涵盖控制器设计概念。
软件选项
-Altair Activate
-可执行程序和GUI
-LabVIEW, 实时, FPGA (可选)
-MatLab/Simulink
-用于外部控制的API(LV、Matlab、Python的例子)。
特点
装配完毕,可随时控制带有集成动力装置的工厂
具有丰富的图形用户界面的入门程序,提供开箱即用的用户体验
实现先进的数字控制技术
与MATLAB®/Simulink®和LabVIEW™完全兼容
具有六个独立执行器的平行操纵器
用于计算扭矩的电流反馈
平台的位置感应由6-DOF陀螺仪传感器实现
精密制作的底盘结构
开源软件架构使用户能够创建自己的实时算法
---