
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}
{{product.productLabel}} {{product.model}}
{{#if product.featureValues}}{{product.productPrice.formattedPrice}} {{#if product.productPrice.priceType === "PRICE_RANGE" }} - {{product.productPrice.formattedPriceMax}} {{/if}}
{{#each product.specData:i}}
{{name}}: {{value}}
{{#i!=(product.specData.length-1)}}
{{/end}}
{{/each}}
{{{product.idpText}}}

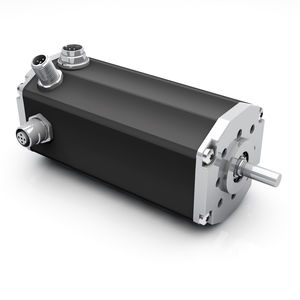
功率: 55, 52.5 W
扭矩: 0.168, 0.161 Nm
旋转速度: 3,280, 3,110 rpm
... ” 集成运动控制器,用于动态定位的 4 象限驱动器 ” 通过使用集成的运动控制器和集成的转子位置编码器。甚至可以执行非常复杂的运动配置文件 ” 集成的磁增量编码器允许速度控制低至 50 rpm 额定电压-V: 12 标称电流-A: 5.8 标称扭矩-Ncm: 16.1 标称速度- 转速:3110 无负载时摩擦力矩-Ncm: 1.9 最大扭矩 Ncm: 49.7 无负载速度-转速:3855 最大输出功率 W:86 标称功率-W: ...
Dunkermotoren GmbH/德恩科

功率: 55, 52.5 W
扭矩: 0.161, 0.168 Nm
旋转速度: 3,280, 3,110 rpm
... ” 集成 4Q 伺服控制器 ” PC 软件易于使用,用于参数化。速度、位置和扭矩等基本模式易于参数化 (PI) ” 可自由编程版本 (MI) 标称电压-V: 12 标称电流-A: 5.8 标称扭矩-Ncm:16.1 标称速度-rpm:3110 无负载时摩擦力矩-Ncm: 1.9 最大扭矩 Ncm: 49.7 否负载速度-转速:3855 最大输出功率 W: 86 标称功率-W: 52.5 扭矩常数-Ncm/A: 3.11 ...
Dunkermotoren GmbH/德恩科

功率: 82.4, 90.5 W
扭矩: 0.25, 0.246 Nm
旋转速度: 3,190, 3,360 rpm
... ” 集成运动控制器,用于动态定位的 4 象限驱动器 ” 通过使用集成的运动控制器和集成的转子位置编码器。甚至可以执行非常复杂的运动配置文件 ” 集成的磁增量编码器允许速度控制低至 50 rpm 额定电压-V: 12 标称电流-A: 5.8 标称扭矩-Ncm: 16.1 标称转速-转速:3110 无负载 时摩擦扭矩 Ncm: 1.9 最大扭矩 Ncm: 49.7 无负载速度-转速-3855 最大输出功率 W: 86 标称功率-W: ...
Dunkermotoren GmbH/德恩科

功率: 82.4, 90.5 W
扭矩: 0.246, 0.25 Nm
旋转速度: 3,190, 3,360 rpm
... ” 集成 4Q 伺服控制器 ” PC 软件易于使用,用于参数化。速度、位置和扭矩等基本模式易于参数化 (PI) ” 可自由编程版本 (MI) 标称电压-V: 24 标称电流-A: 4.9 标称扭矩-Ncm: 25 标称速度-rpm: 3360 无负载时摩擦扭矩-Ncm: 3.9 最大扭矩 Ncm: 94.2 无负载转速-转速:3980 最大输出功率 W: 159 标称功率-W: 90.5 扭矩常数-Ncm/A: 5.9 ...
Dunkermotoren GmbH/德恩科
功率: 206 W
扭矩: 0.37 Nm
旋转速度: 3,520 rpm
... ” 集成 4Q 控制器” 通过数字和模拟输入进行控制, CANOpen 或 RS 485 ” 输入和输出可以单独分配 ” 独立操作 ” 两个 CANOpen 连接器 ” 完全 CIA 402 兼容 ” 速度控制, 电流控制和低分辨率位置控制 ...
Dunkermotoren GmbH/德恩科

功率: 862, 876, 859 W
扭矩: 2.16, 2.14, 1.99 Nm
旋转速度: 3,810, 3,910, 4,120 rpm
... ” 控制槽 CANOpen (CO) 或独立操作 (IO) 通过数字和模拟输入 ” 集成 4Q 控制器 ” 高位置精度和出色的控制特性,因为一个整体式磁编码器,每轮 4x1024 脉冲分辨率为 4x1024 脉冲 ” 带窦换向 ” 电源和逻辑电源电流绝缘 ...
Dunkermotoren GmbH/德恩科
请说明:
您的建议是我们进步的动力:
剩余字数